
NOX5 — это простая рама размера 210 мм со сменными лучами, разработанная для использования с 5″ винтами.
Купить NOX5 от DemonRC. Кроме того, существует рама NOX3 — для 3″ винтов, скоро будет готов обзор.
Обзор рамы NOX5
Упаковка и содержимое набора:

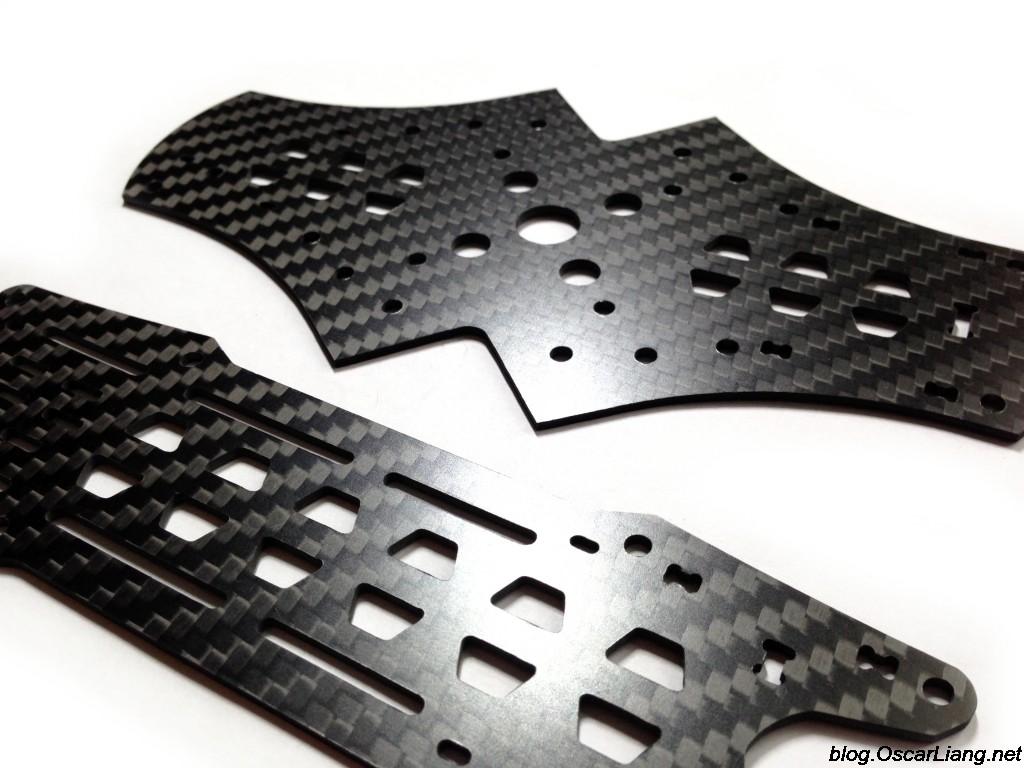
Как обычно, карбон от DemonRC имеет отличное качество реза, фрезеровка тоже очень аккуратная. Края достаточно острые, так что я рекомендую их сгладить перед сборкой, чтобы при падениях предотвратить повреждения кабелей и стяжек острыми углами.

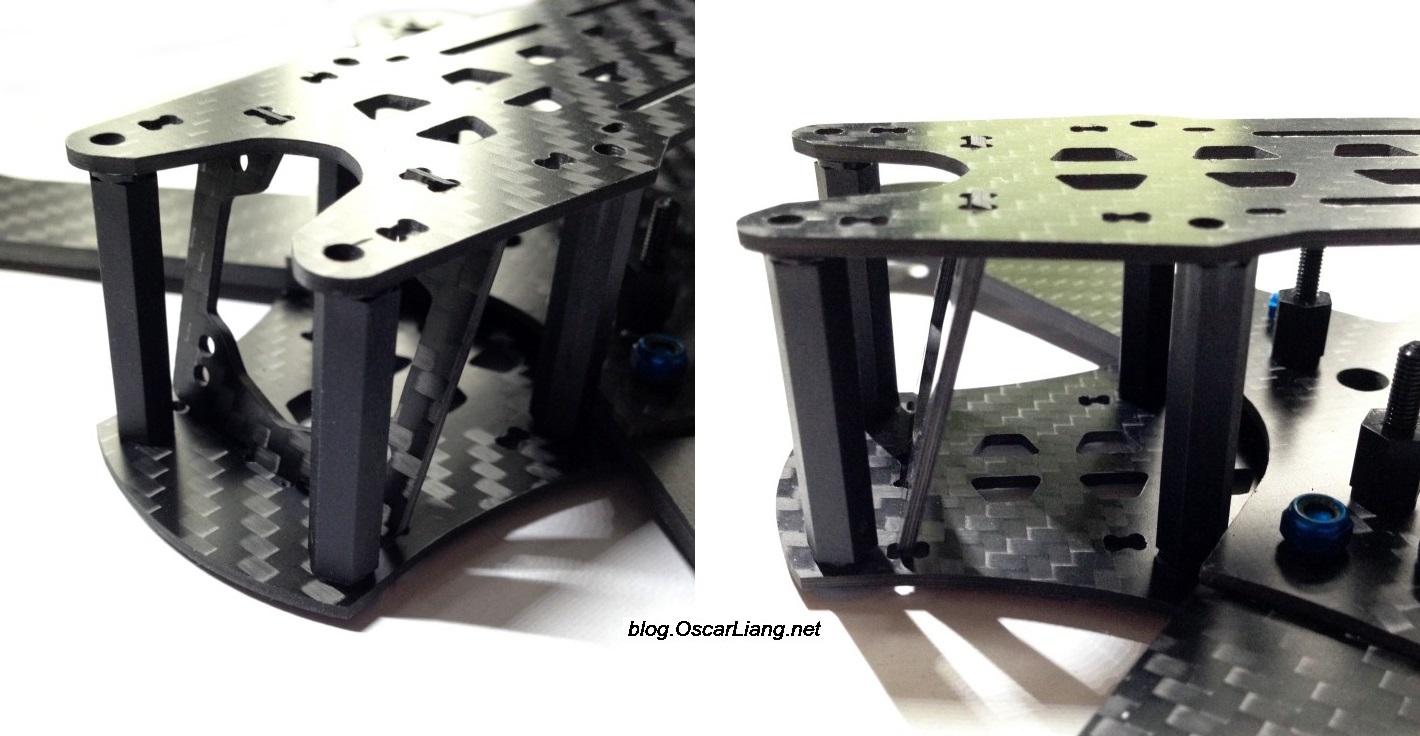
Камеру на эту раму можно закрепить двумя способами.
Первый способ подойдет для камер в корпусе, типа Runcam Swift или HS1177. Однако, камера Runcam Sky немного не помещается.
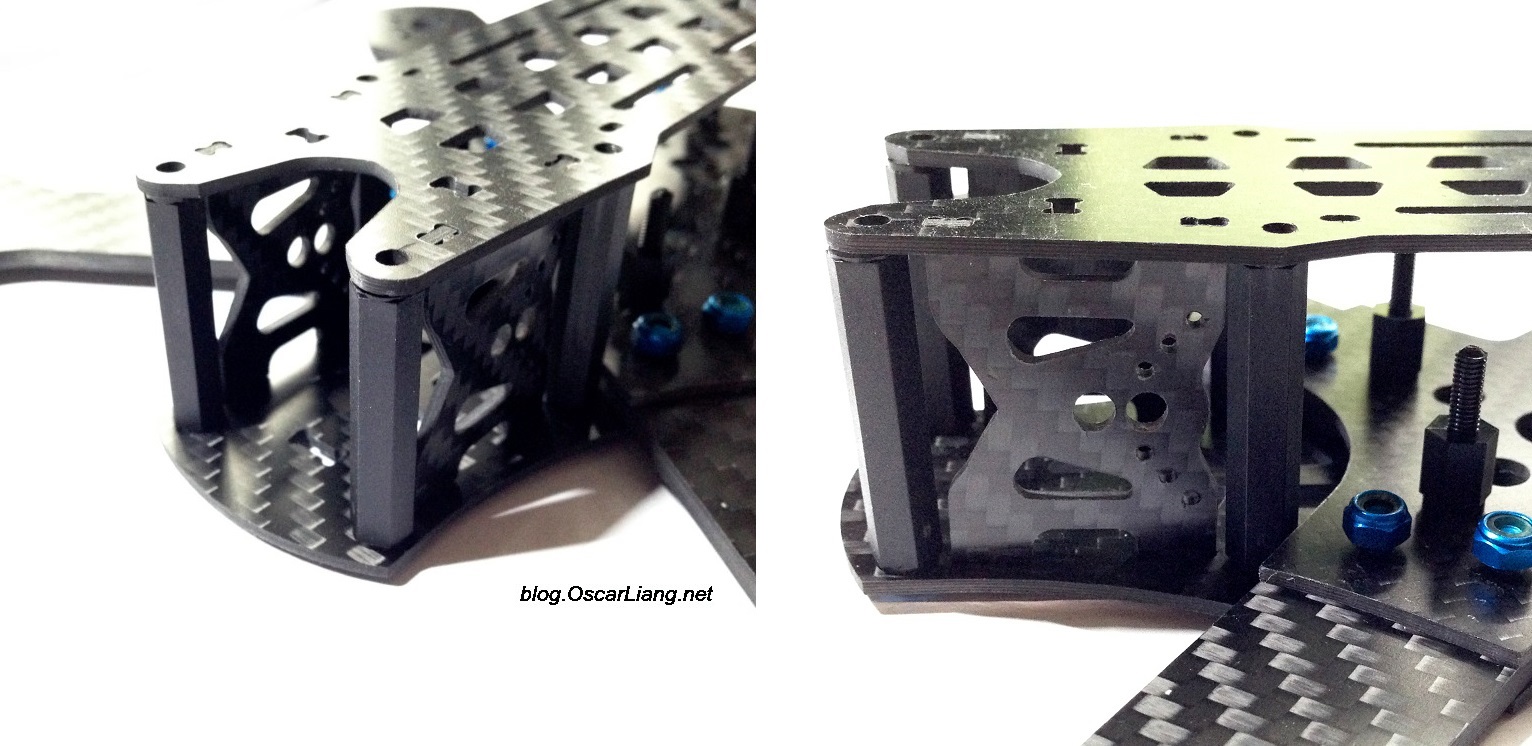
Второй способ для камер без корпуса типа PZ0420M (и Runcam Sky без корпуса).
Я заметил, что рама немного влазит в кадр, вероятно из-за того, что я использую линзу с фокусным расстоянием 2.4мм, при использовании линзы 2.8 мм этой проблемы наверное не будет. Кроме этого в кадре видны винты, все из-за короткой рамы. Это достаточно часто встречающаяся проблема многих мелких рам рассчитанных на 5″ винты, не страшно, вы быстро привыкните.

Дополнительная верхняя пластина нужна для крепления HD камер типа GoPro, XiaomiYi при помощи липучек велкро. В сравнении с Speed Addict 210 здесь больше места.
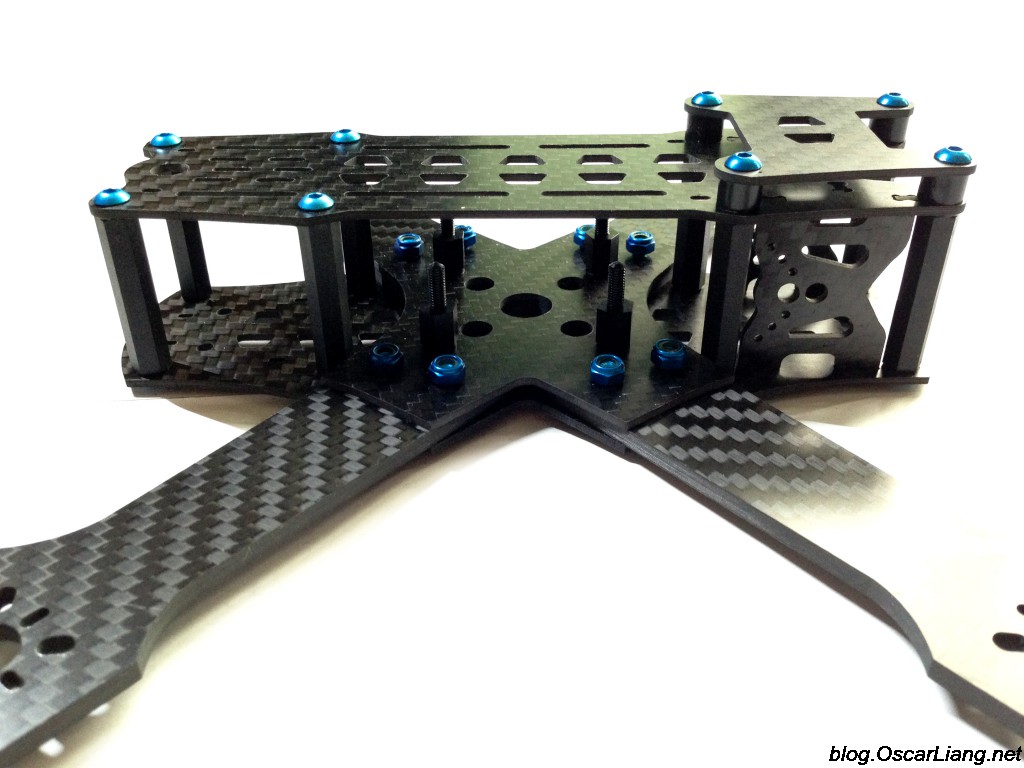
Еще одна хорошая новость: в раму NOX5 помещается TBS PowerCube если поменять нижнюю и среднюю пластины (этот полетный контроллер + регуляторы великоваты для большинства 5″ рам).
Я не использую TBS PowerCube, но воспользуюсь хитростью его установки, что даст мне дополнительные 5 мм по высоте (увидите ниже). Это отличное решение, если требуется дополнительное место, но оно немного сместит центр тяжести и прочность рамы. Адам, дизайнер рамы прокомментировал это:
Я рекомендую следовать инструкции, потому что если вы опустите ЦТ на 5 мм, то немного ухудшите характеристики коптера.
Кроме того, распределение нагрузок также изменится, нижняя пластина работает (почти всегда) на растяжение, а верхняя на сжатие. Как правило, нижнюю пластину необходимо делать более прочной, поэтому центральную можно сделать менее прочной. Я не могу гарантировать что рама будет такой же крашеустойчивой как в оригинальной конфигурации.

Лучи выглядят очень крепкими. Их форма похожа на другую раму от DemonRC — EVO250 (англ.).

Мне нравится чувство юмора DemonRC относительно именования этой рамы. Очевидно, что NOX значит «NOT X» («не Х»), т.е. что рама не полностью соответствует X форм фактору.
Что можно улучшить
- Качество рамы очень понравилось, особенно карбон. Но мне хотелось бы чтобы винты были бОльшими шляпками. Алюминий очень мягкий и очень легко свернуть мелкую шляпку, а я уже так делал несколько раз на других рамах.
- Используйте пакетики для винтиков которые можно многократно закрывать (зип локи) 🙂
- Еще одна мысль — крепление для камеры HS1117. Я недавно рассматривал раму Speed addict 210 и понял, что их крепеж курсовой камеры сделан очень удачно. Он позволяет менять угол наклона камеры даже прямо в поле. Я думаю это очень удобно, потому как необходимый угол наклона может зависеть от окружающей среды. Конечно на NOX5 вы тоже можете изменить угол, но понадобятся отвертки. 🙂
Сборка

Я соберу этот квадрик на полетном контроллере KISS FC и регуляторах KISS 24A ESC, на которые я недавно писал обзоры. Полный список комплектующих:
- KISS FC
- KISS 24A ESC Race Edition
- Моторы EMAX RS2205 2600KV
- Камера PZ0420M
- Приемник X4R-SB
- Видео передатчик Hawkeye 200mW
- Micro MinimOSD
- Demon Core PDB V2.1
- Винты: Gemfan 5030, 5040, 5045
Мне очень понравилась эта конфигурация: моторы/винты. Высокие обороты (RPM) делают квадрик очень отзывчивым в управлении, и при этом дают высокую скорость на прямых. Кроме того они очень эффективны (как вы можете видеть в обзоре моторов «Red bottom». У меня получается летать 4-6 минут на аккумуляторе 1500мАч 4S.
При использовании Gemfan 5030 и 5040 было немного больше вибраций, лучший результат был с винтами 5045. Я думаю потому что винты 5045 более жесткие и не флаттерят. Винты 5030 вращаются быстрее, поэтому флаттер ощущается сильнее. Но со всеми этими винтами можно летать в свое удовольствие.
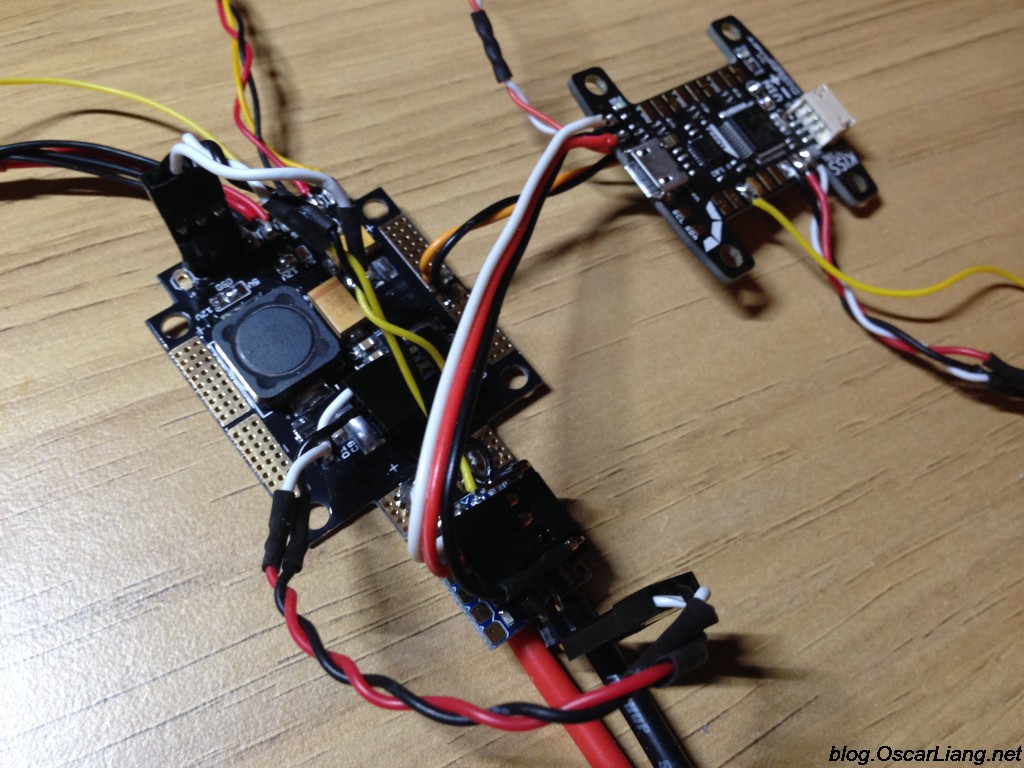
FPV оборудование и PDB
У меня PZ0420M — это новая версия с объективом 2.4 мм. Некоторым пилотам 2.8 мм кажется слишком узким, а 2.1 — слишком широким, что-то по серединке — это прекрасно!


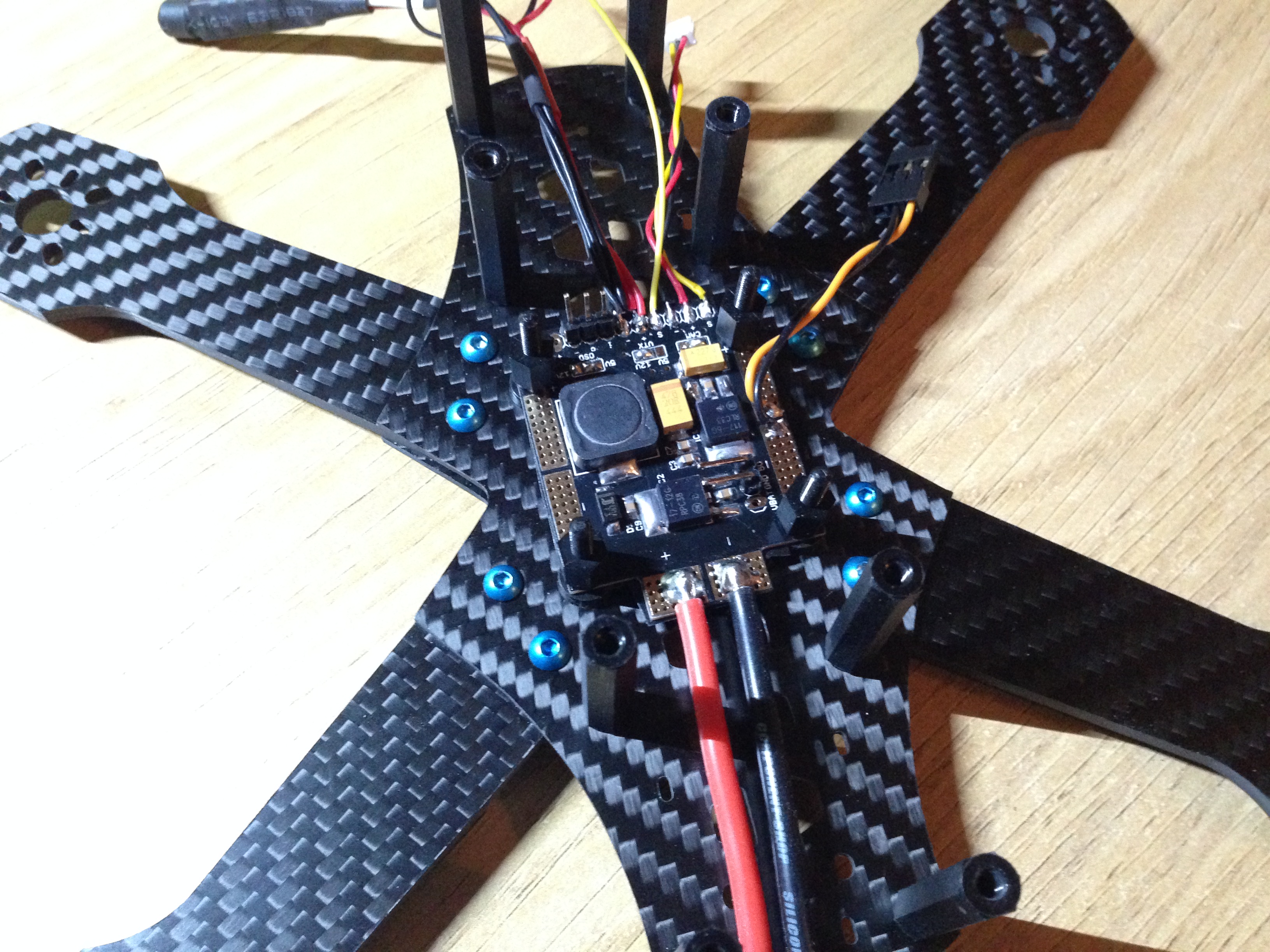
Я вначале думаю как проложить провода, а затем паяю.
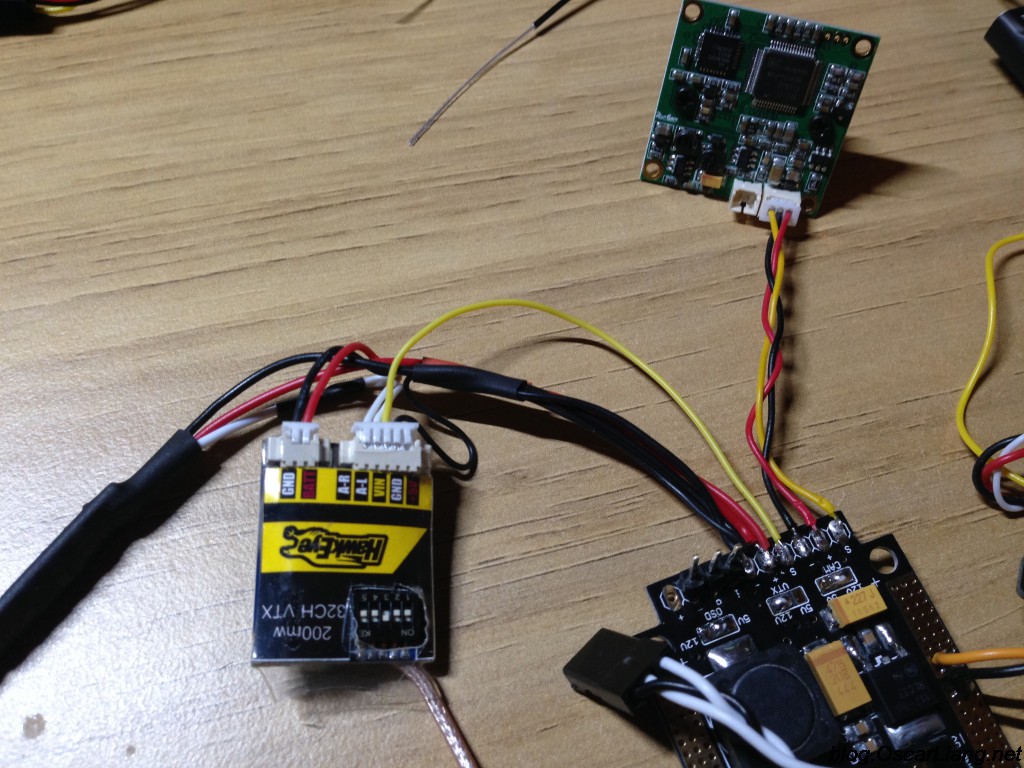
Поэтому я начал с платы распределения питания (PDB). Все FPV оборудование будет подключено к ней, оно не соединяется между собой, что делает разводку аккуратнее и проще.
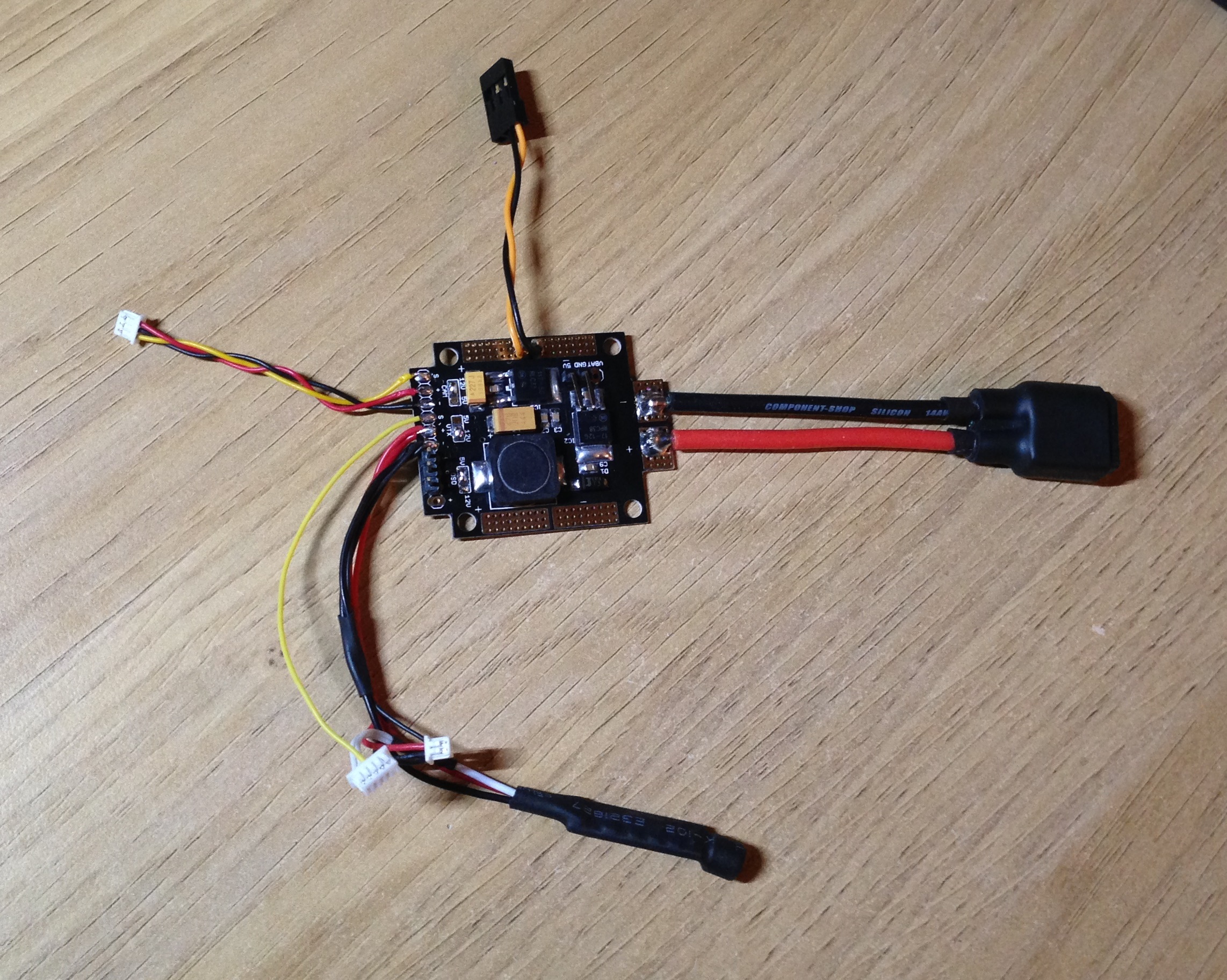
Замечу, что я также припаял внешний микрофон, он питается от PDB 12В, а сигнальный провод подключен к аудио входу видео передатчика. Про плюсы и минусы полетов со звуком можно прочитать тут.
Затем я подключил видео передатчик и камеру к PDB, чтобы убедиться что все FPV оборудование работает нормально.
MicroMinimOSD
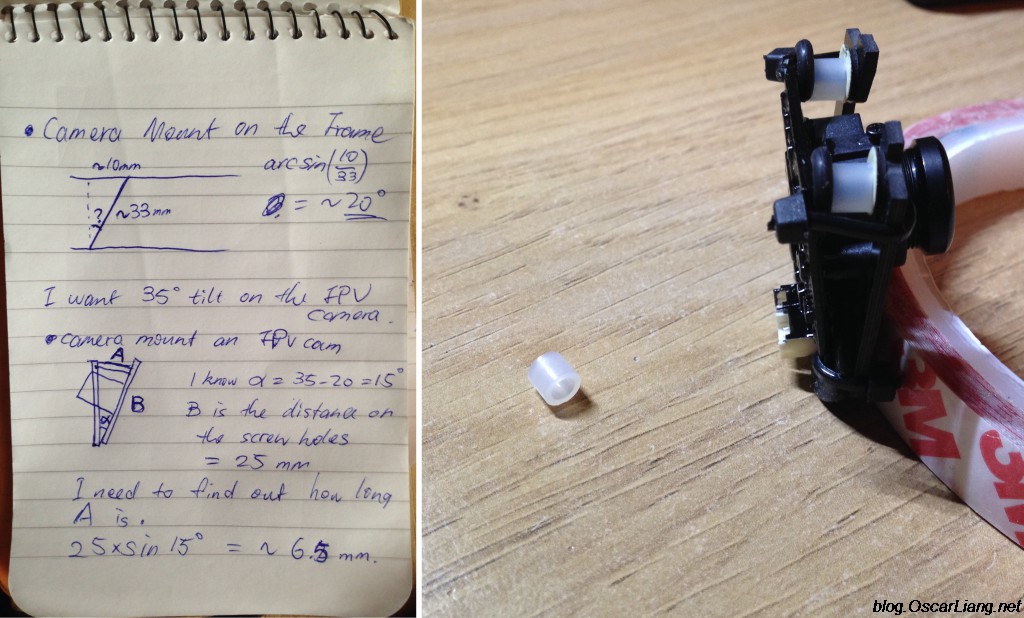
Крепление камеры на раме дает угол 20 градусов (подтверждается вычислениями, см ниже). Однако я хотел иметь угол наклона 35 градусов, так что мне нужно было добавить места между камерой и крепежом на раме.
Немного посчитав, я выяснил, что дополнительно нужно примерно 6.5 мм, что даст мне 15 градусов, в дополнении к имеющимся 20.
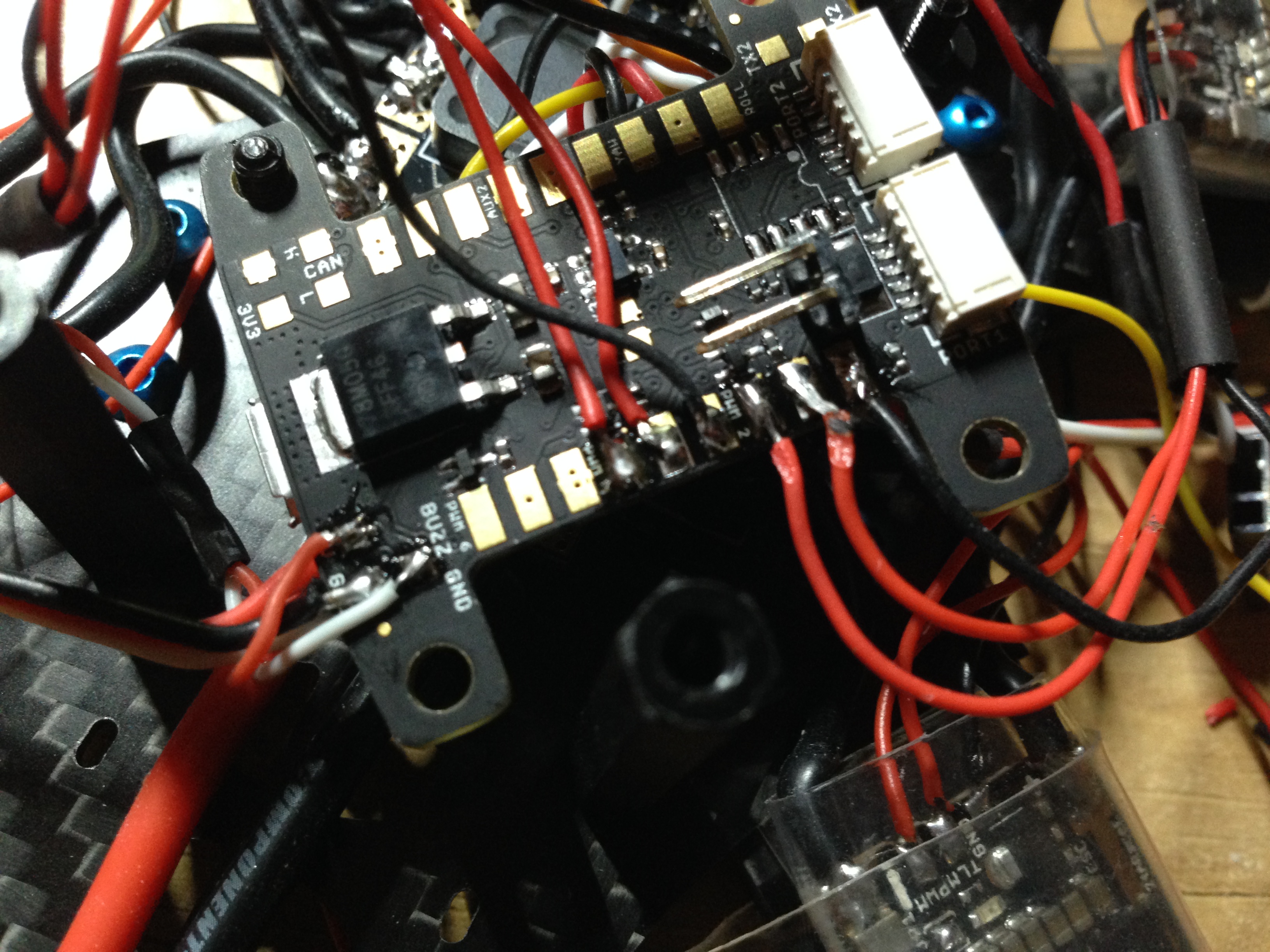
Полетный контроллер и приемник
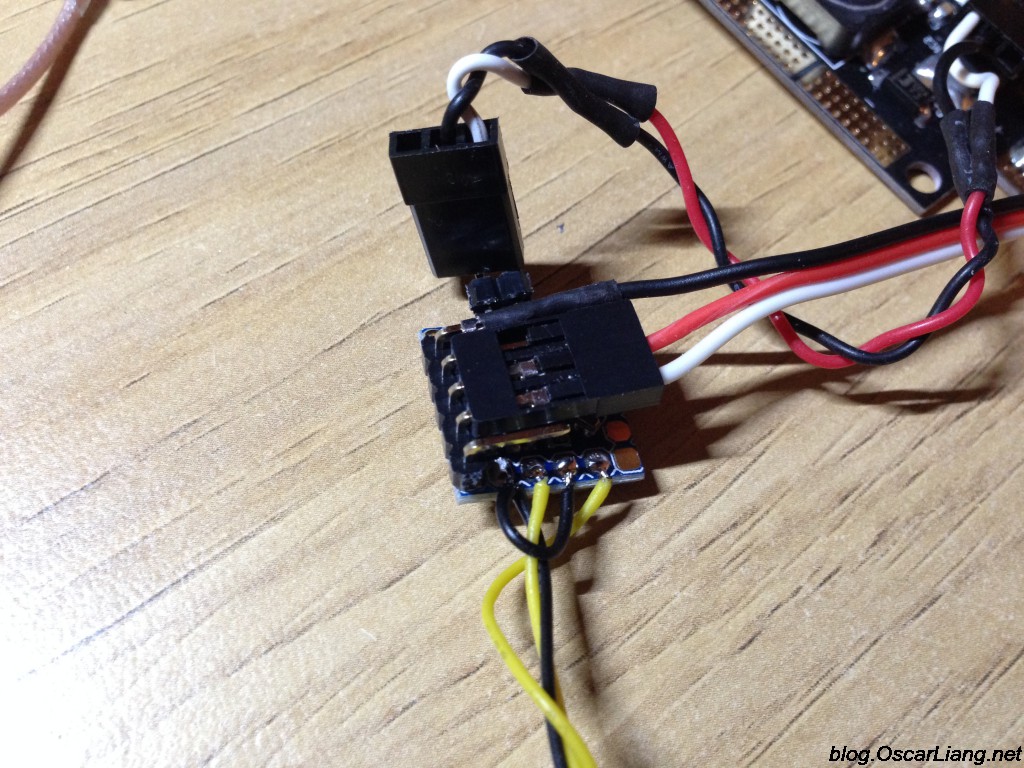
Припаял провода для SBUS и Smartport, а также последовательный порт для MinimOSD и пищалку.
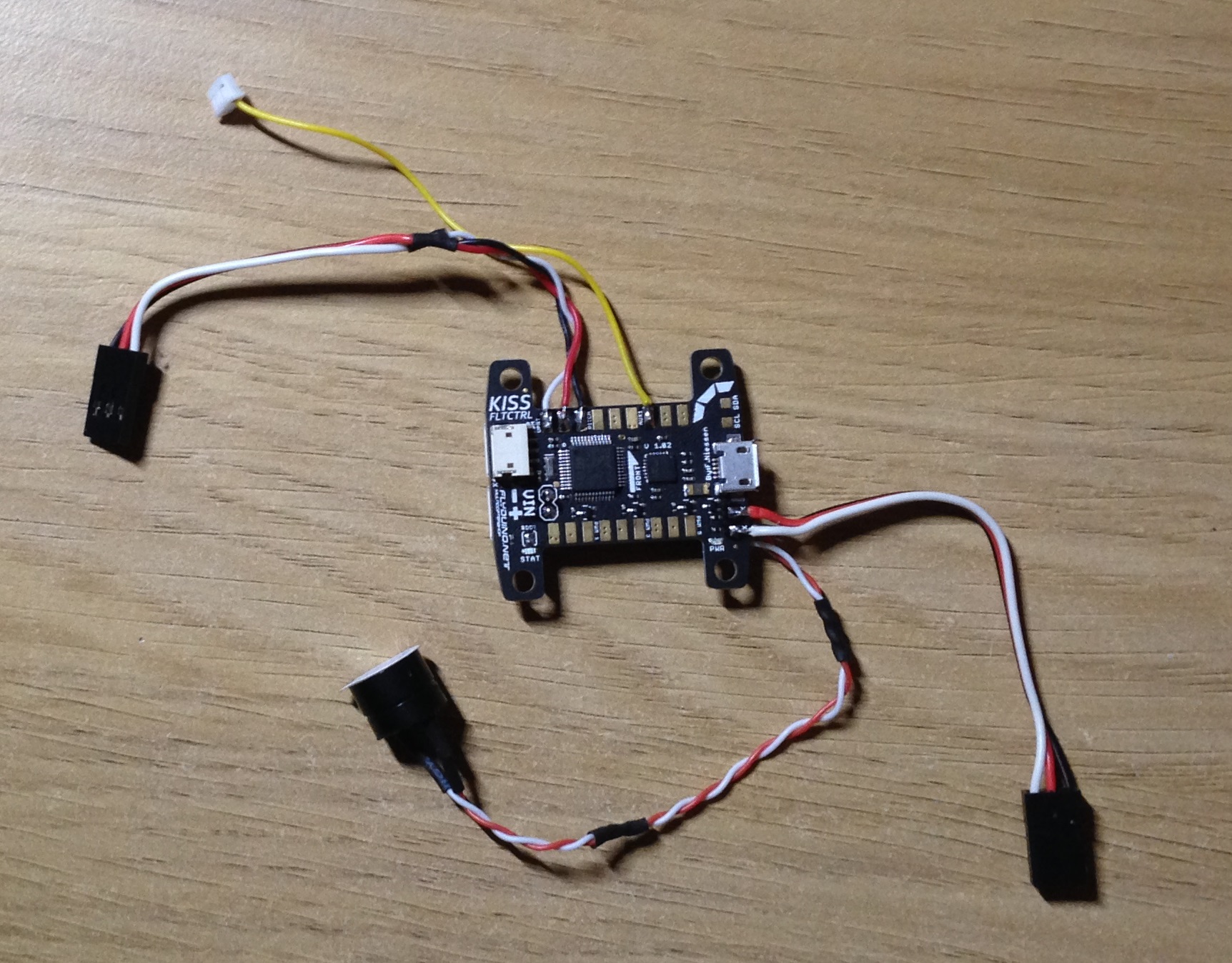
Следующее что я сделал — это протестировал полетный контроллер и приемник с подключенным портом Smartport (желтый кабель).

Контроллер KISS FC можно питать напрямую от аккумулятора 4S, питание также используется как VBAT для измерения его напряжения.

Подключаем последовательный порт (RX и TX) к MinimOSD. Все оборудование я подключил к PDB и протестировал прежде чем устанавливать на раму.
Моторы и регуляторы
Припаял моторы напрямую к регуляторам KISS 24A
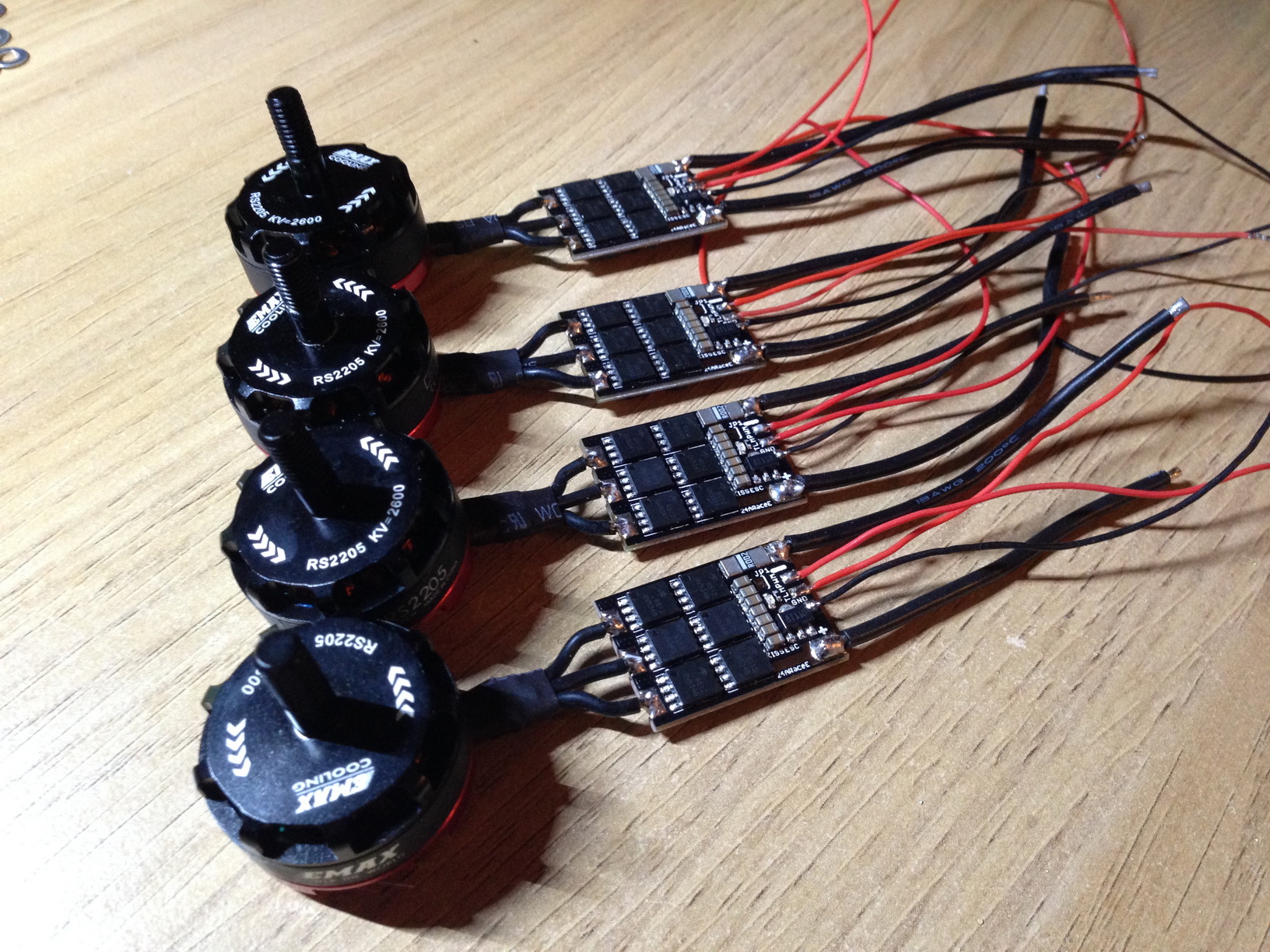
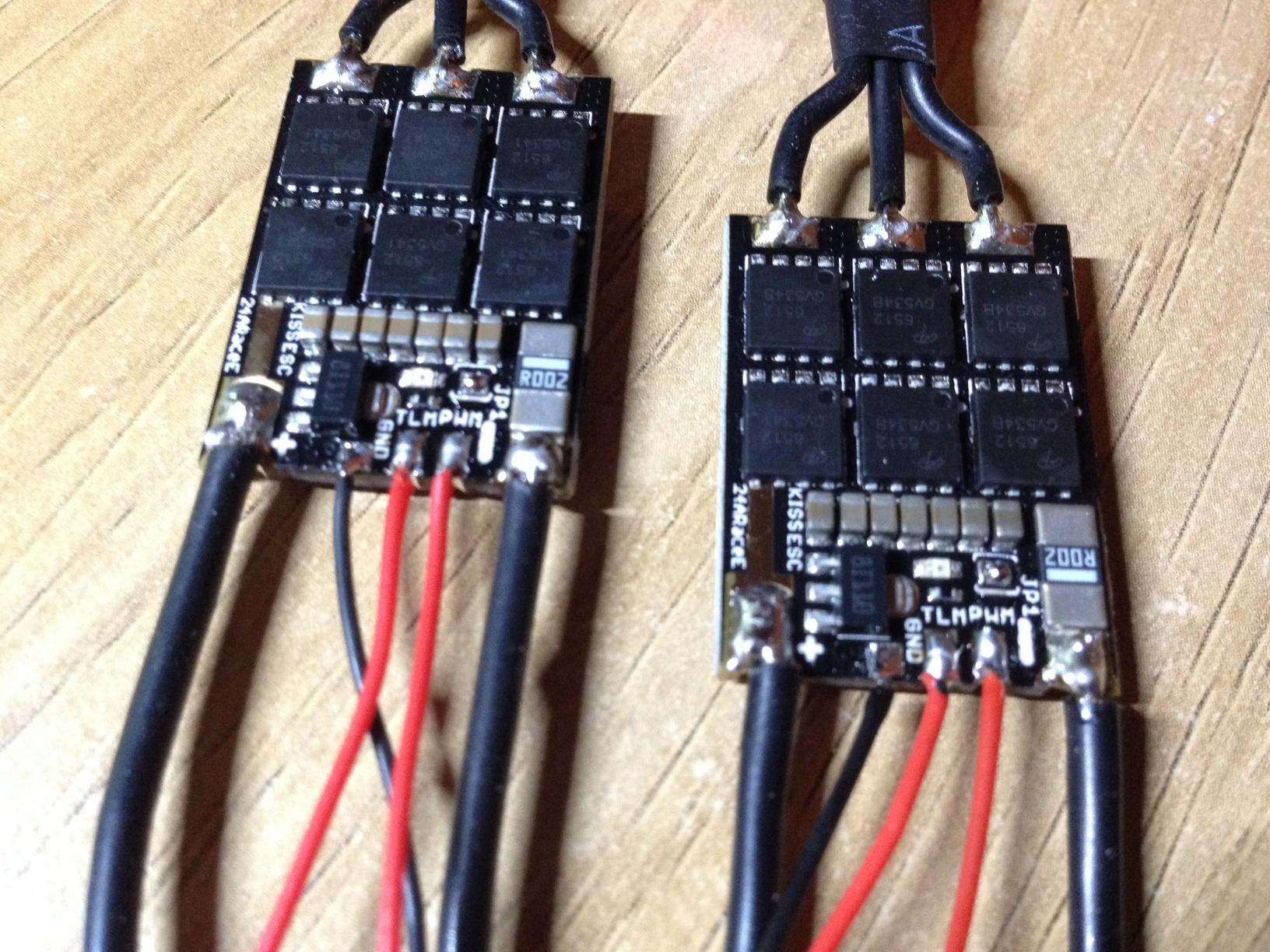
На следующей картинке видно 5 проводов у регулятора, слева направо: «+» питания, земля для сигнала, телеметрия, управляющий сигнал, «-» питания. Я использую провод калибра 18AWG для подключения регуляторов и 26AWG в качестве сигнальных.
При прямом подключении (пайке) моторов к регуляторам, единственно о чем стоит побеспокоиться это направление вращения. Не одевайте термоусадку пока не убедитесь что моторы вращаются в нужную сторону.
Если они вращаются не туда, то измените направление вращения в настройках регулятора (в моем случае это KISS ESC, у которых есть специальная перемычка, которую нужно запаять). При использовании EMAX RS2205 и пайки как на картинке моторы будут вращаться против часовой стрелки.
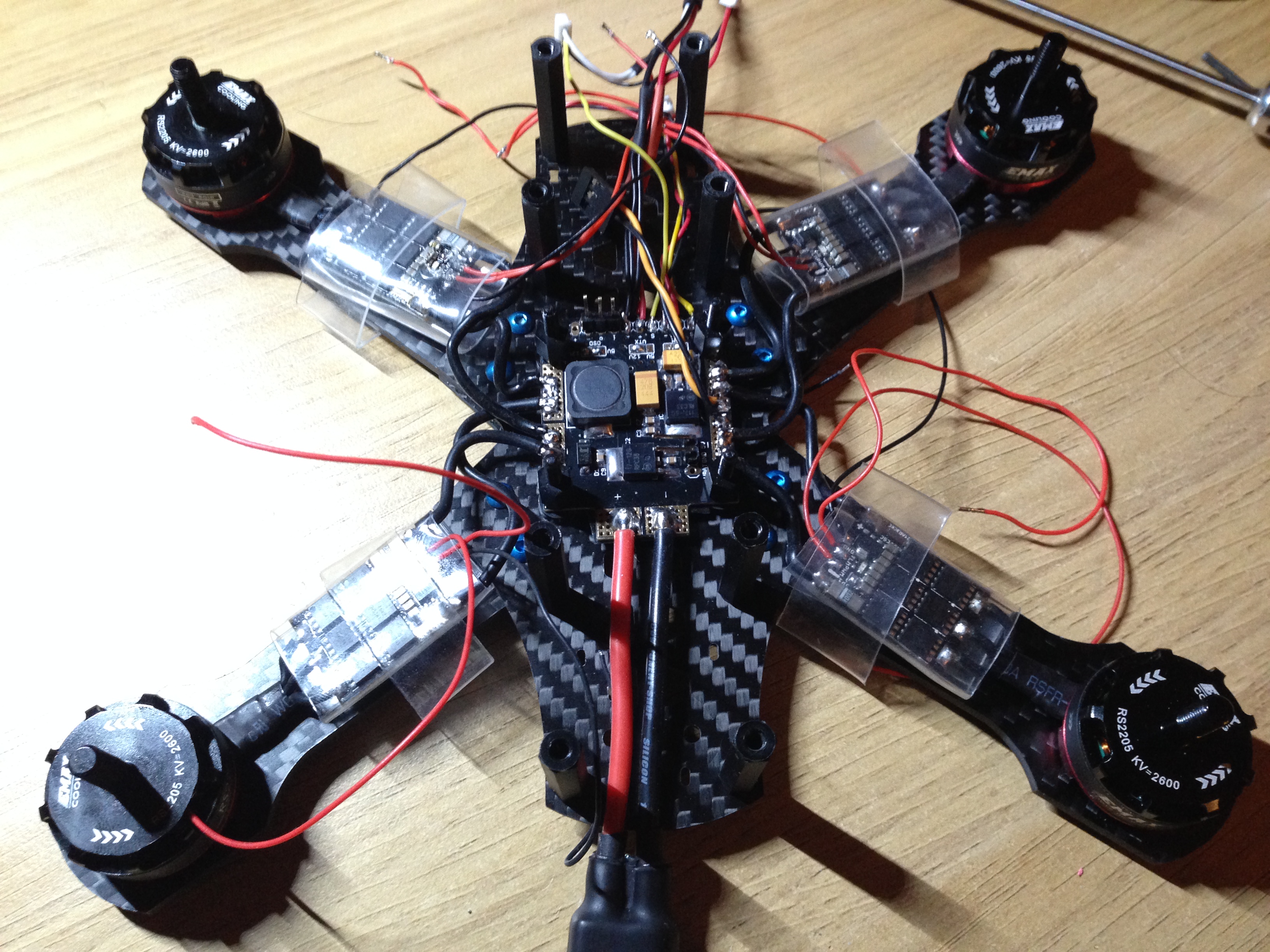
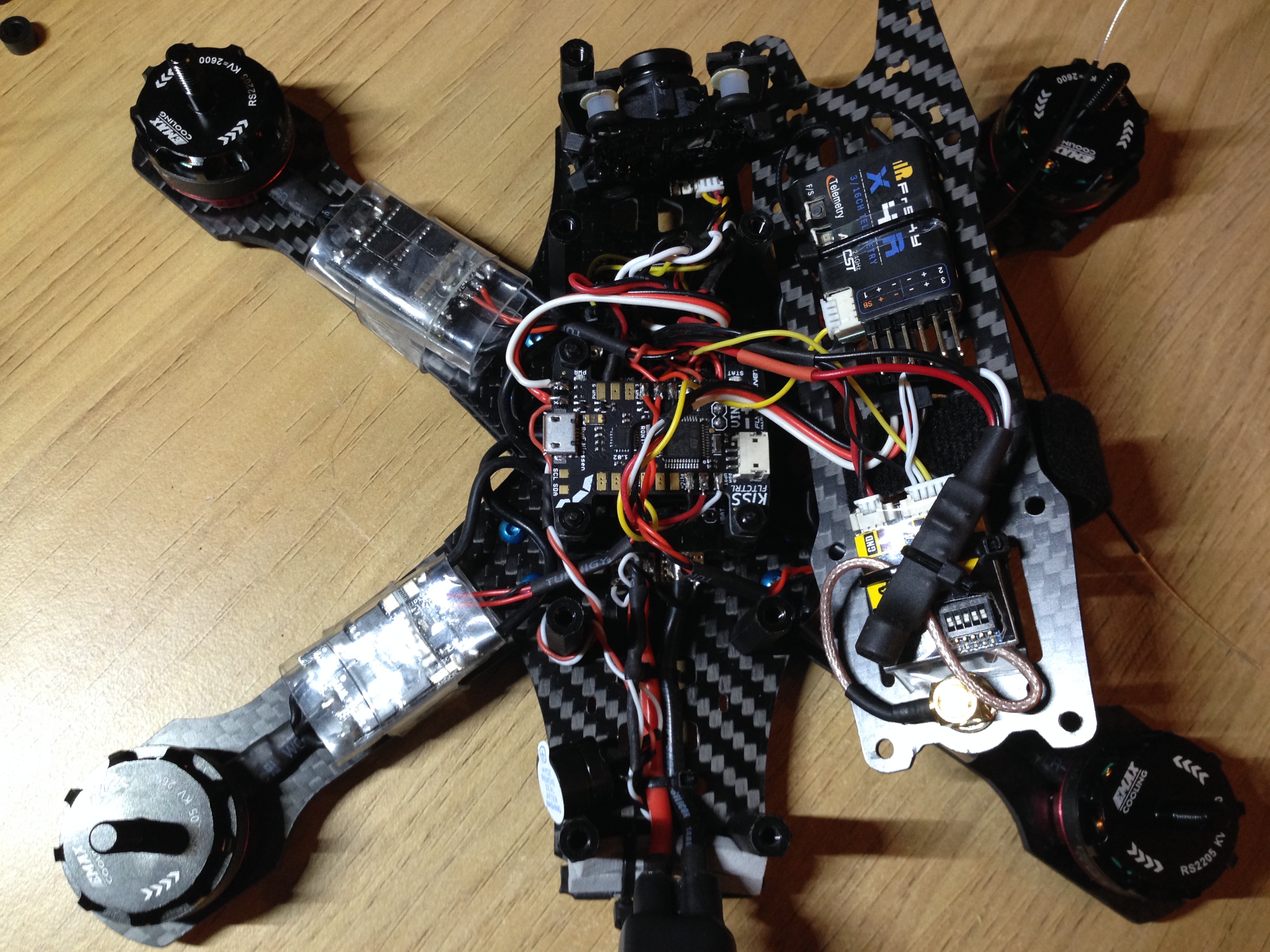
Размещаем электронику на раме
Возможно вы заметили, я поменял пластины на раме! 🙂 так что центральная пластина на самом деле внизу. Это дает примерно 5мм высоты внутри рамы.
Т.к. я уже все припаял и протестировал, то просто размещаю все на раме.
Измерьте длину сигнальных проводов и обрежьте их.
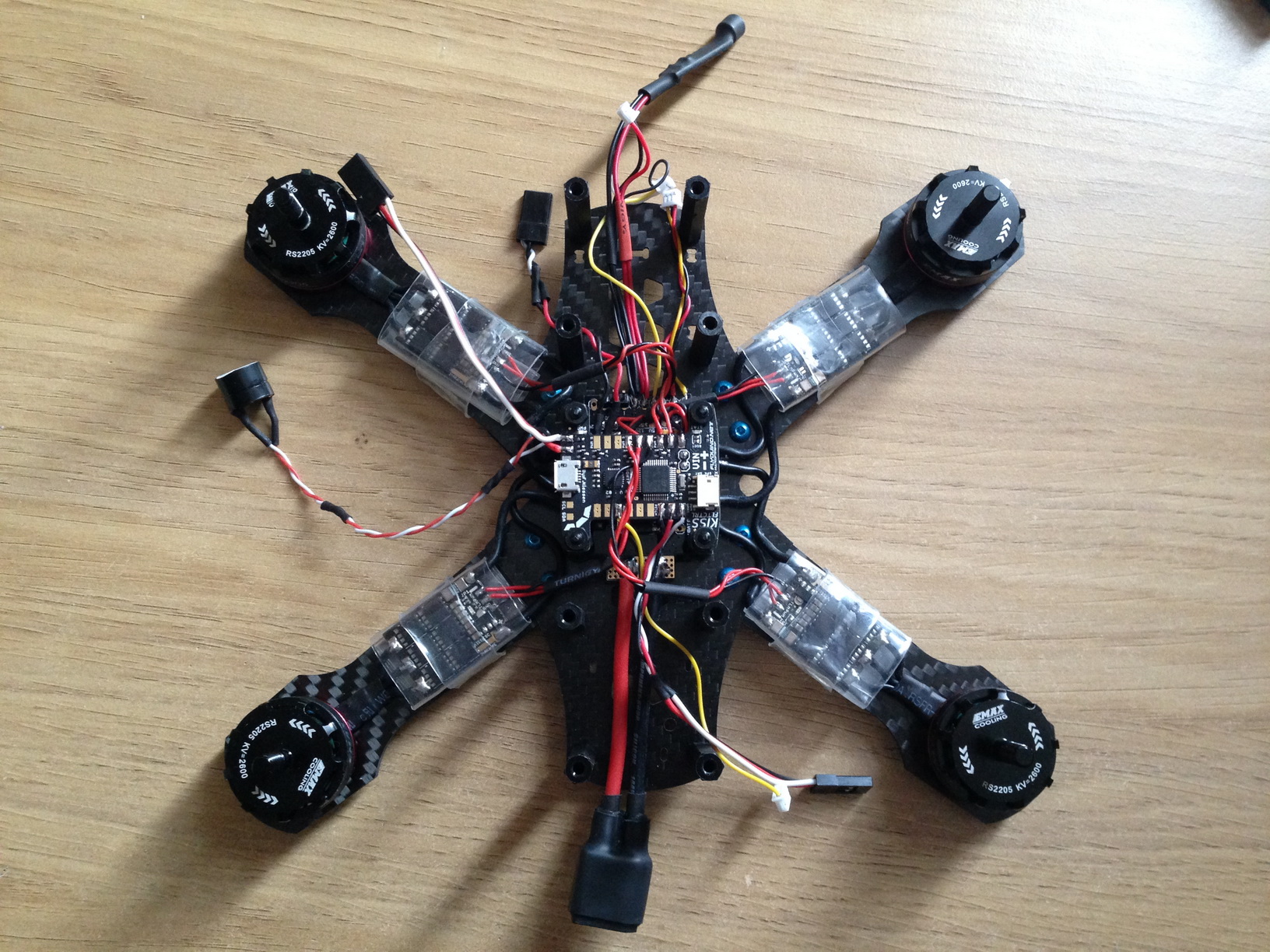
Мне на самом деле не нравится распиновка на KISS FC, контакты к моторам расположены с одной стороны как сверху так и снизу, из-за этого разводка проводов получается не очень аккуратной.
Видео передатчик и приемник я разместил на верхней пластине, почти закончил!
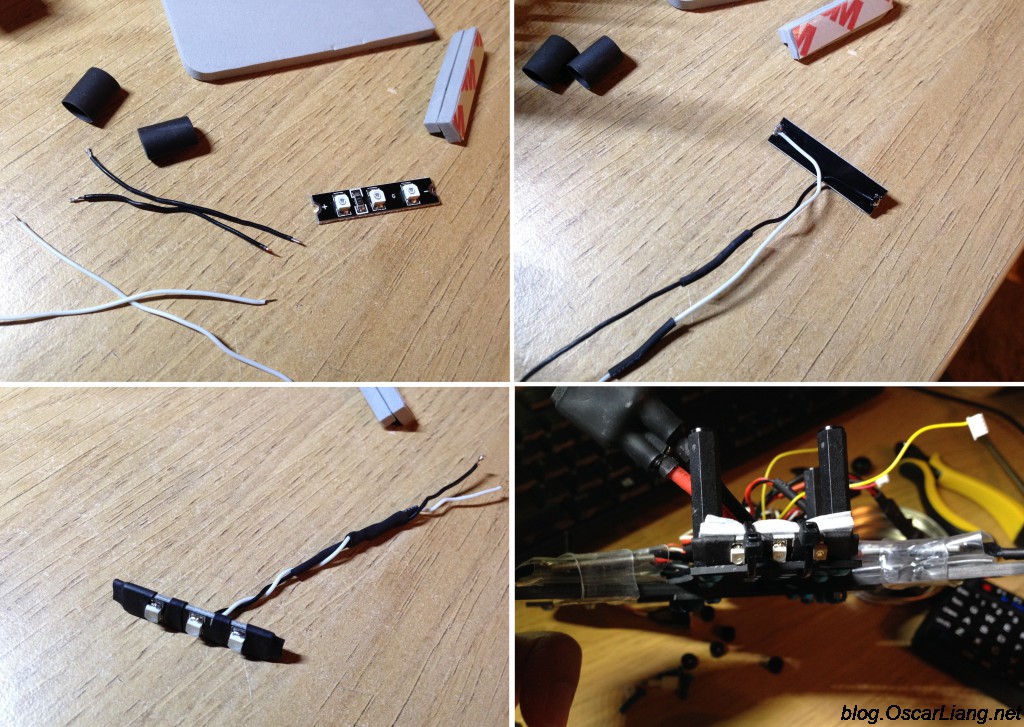
Светодиодная полоска
Как всегда, последний штрих — это светодиодная полоска. Это то что мои оппоненты увидят в гонке, поэтому сделаем светодиоды достаточно яркими! 🙂
Я рекомендую одноцветные светодиодные полоски. В комплекте идет 3 полоски (всего $1.5), все разного цвета (белый, синий, зеленый, красный). Что очень важно, их можно питать как от 3S так и от 4S! Это делает разводку проводов сильно проще.
Закончили! Несколько картинок сборки:
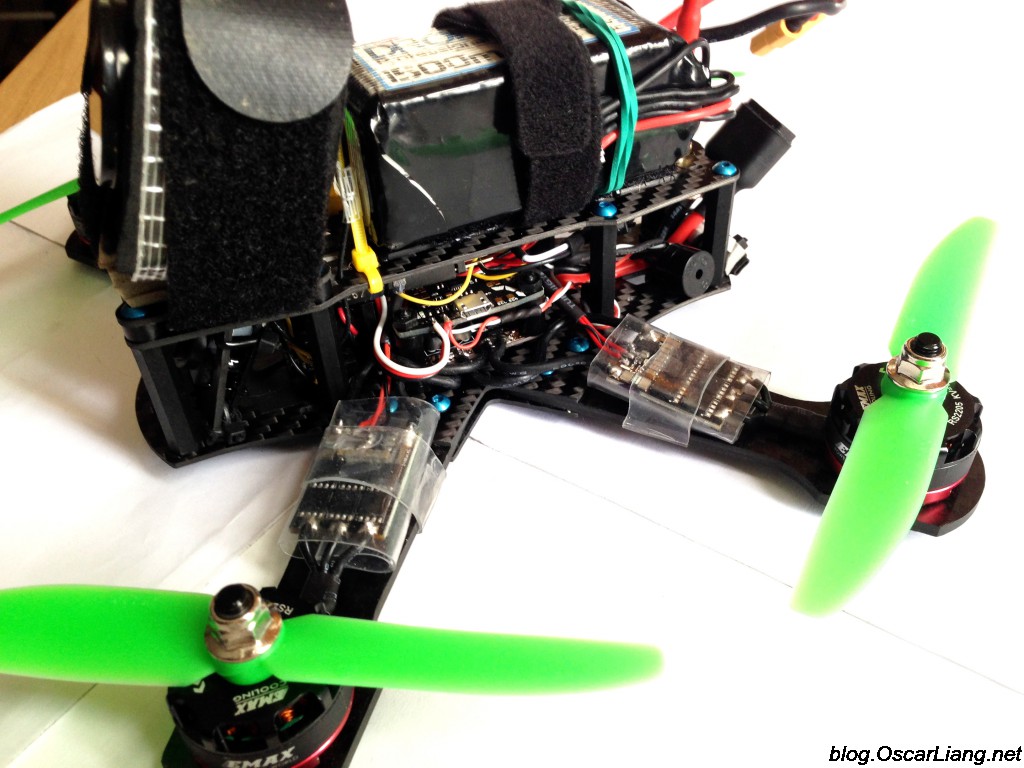


NOX5 бок о бок с Speed Addict 210, в настоящее время это мои любимые 5″ квадрики 🙂

Speed addict 210 — это низкопрофильная рама, имеет более длинный корпус, более тонкие лучи и unibody дизайн (лучи и нижняя пластина — единое целое), так что она выглядит немного тоньше и более агрессивно.
Но лучи на NOX5 не гнутся, хотя и имеют толщину 3мм.


Это полет в выходные:
И самый первый полет: