«GPS Rescue mode» в Betaflight — это режим типа «возврат домой». Когда пропадает видео или сигнал управления коптер возвращается назад, используя GPS.
Оригинал: How to Setup GPS Rescue Mode in Betaflight
Не ждите, что он будет работать также как в коптерах DJI, пока он проще. Коптер вернется не в ту же самую точку откуда стартовал, но вернется достаточно близко к ней, чтобы сигнал восстановился и управление вернулось. Это очень полезная функция Betaflight, особенно, если вы летаете на большие расстояния, однажды она может спасти коптер.
Читайте и другие мои руководства по настройке и использованию Betaflight
Требования
- Прошить Betaflight 3.5 или более новую версию
- Настроить GPS модуль
У меня вот такой GPS модуль.
Барометр не обязателен, но все же рекомендуется его подключить. Компас не нужен, он не используется. В полетнике Kakute F7 есть встроенный барометр.
Настраиваем GPS Rescue Mode
После того, как вы настроили GPS, нужно сконфигурировать режим спасения.
Некоторые настройки придется поменять, чтобы режим спасения нормально работал именно в ваших условиях. Не забудьте заглянуть в оф. документацию Betaflight и разобраться за что какой параметр отвечает: https://github.com/betaflight/betaflight/wiki/GPS-rescue-mode
В консоли (CLI) введите «get gps» и в ответ получите список параметров связанных с настройкой GPS.
set gps_rescue_min_sats = 6
Вы не сможете заармить коптер, если GPS приемник видит меньше спутников, чем указано в этом параметре, так что поставьте значение 0, если вы не хотите ждать перед каждым полетом. Когда захотите воспользоваться GPS, просто перед полетом дождитесь нужного числа найденных спутников 🙂 (это значение можно вывести на экран через OSD).
Замечу, что если вы взлетаете, но спутников найдено мало, то коптер не будет знать где у него дом. Рекомендуемое значение от 6 до 8.
set gps_rescue_angle = 45
Угол в градусах на который коптер может отклоняться для полета вперед. Значение по умолчанию равно 30, возможно потребуется увеличить это значение если коптер недостаточно мощный, чтобы лететь против ветра. Однако если угол слишком большой, то коптеру будет сложно удерживать высоту, так что значение очень сильно зависит от мощности коптера.
set gps_rescue_descent_dist = 100
На этом расстоянии (в метрах) коптер начнет снижаться. Укажите расстояние, на котором, по вашему мнению, вернется управление коптером.
set gps_rescue_initial_alt = 50
Высота в метрах, на эту высоту поднимается коптер для возвращения домой. Она должна быть достаточно большой, чтобы коптер пролетел выше деревьев, зданий, линий электропередач и т.п. Но такой, чтобы вы смогли его увидеть.
set gps_rescue_ground_speed = 1000
Скорость в см/с с которой коптер будет возвращаться домой. Мне кажется, что значение по умолчанию 2000 см/с (т.е. 20 м/с) слишком велико, так что я поставил 1000 см/с = 10 м/с = 36 км/ч.
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
У некоторых пилотов коптер неожиданно дизармился при полете в режиме спасения. Возможно это связано с детектированием внезапных, незапланированных приземлений. В вики сказано, что не рекомендуется полностью отключать эти проверки, так что я выбрал такое значение, при котором они отключаются при активации режима спасения тумблером, но включены в режиме failsafe.
Активируем GPS Rescue
Есть два способа включить режим GPS Rescue, при помощи тумблера на аппе и при переходе в режим Failsafe. Рекомендую вначале настроить тумблер и протестировать без failsafe.
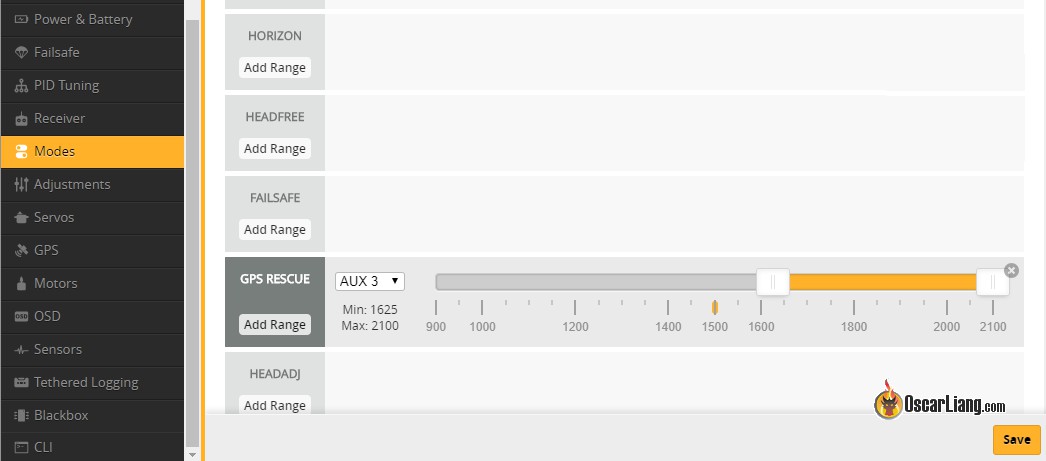
Переходим на вкладку Modes и выбираем канал для режима GPS Rescue.
Тестируем режим GPS Rescue
Снимаем пропы и убеждаемся, что GPS Rescue активируется тумблером с аппы, проверяем что можем его отключить и перейти в акро.
Имейте в виду, что настраивать надо исходя из условий где вы летаете, так что тщательно проверяйте настройки. Постарайтесь сделать это в поле, там, где нет препятствий и людей.
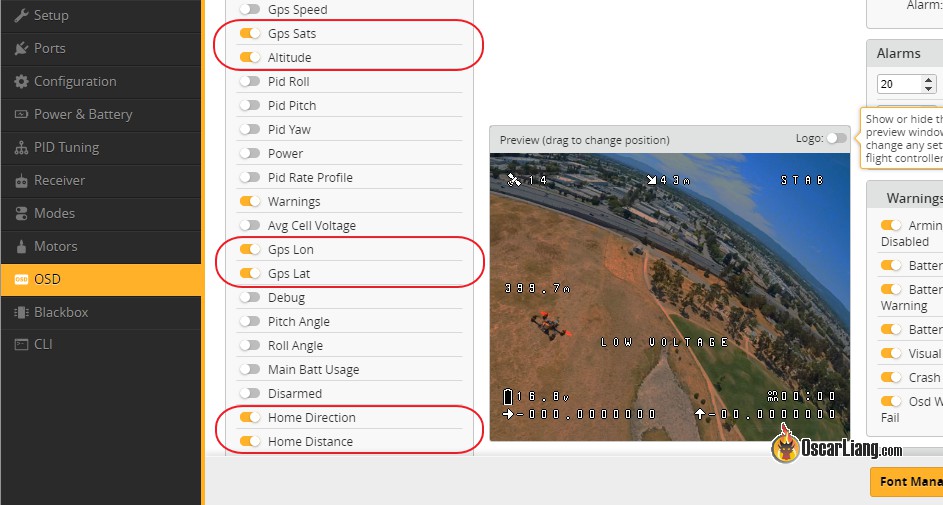
Эти элементы OSD помогут вам понять, что происходит с коптером:
Отлетите по прямой больше, чем дистанция снижения (gps_rescue_descent_dist). Например, если дистанция снижения выставлена в 100 метров, то отлетите на 130-150 метров.
Убедитесь, что стрелка в Betaflight OSD указывает в сторону дома. Если это не так, значит что-то не работает, поэтому не рискуйте и не активируйте режим спасения, а то коптер улетит к кому-то другому домой 🙂
Используем GPS Rescue в Failsafe
После того, как убедились, что режим спасения работает нормально, можно настроить его активацию при фэйлсейфе.
set failsafe_procedure = GPS-RESCUE save
Учтите, что при потере сигнал коптер перейдет в режим спасения, а когда сигнал появится вновь, то переключиться в Acro. Может оказаться так, что в этот момент видео еще не восстановилось, и придется лететь вслепую!
Поэтому важно назначить режим спасения на тумблер. При фэйлсейфе щелкаем тумблер для активации режима спасения и отключаем его только тогда, когда готовы взять управление на себя.
Что происходит при активации режима GPS Rescue?
Квадрик поднимается на заданную высоту, разворачивается и летит в сторону дома. При приближении к дому он начнет снижаться.
После настройки по этой статье, коптер перестал армиться без спутников (в помещении). Это, конечно, логично. Но нельзя ли настроить так, чтобы можно было летать без спутников, пусть даже с отключённой возможностью вернуться?
В статье про это упоминается, см. параметр gps_rescue_min_sats