
Широко известно, что у вертолетов один несущий винт, в то время как мультикоптеры — это необычные летательные аппараты, с 2 или более винтами. В этой статье мы рассмотрим основные типы коптеров, опишем их плюсы и минусы.
Оригинал: TYPES OF MULTIROTOR
Общая информация
В мультикоптерах чаще всего используются винты с постоянным шагом, так что управление летательным аппаратом происходит за счет изменения скорости вращения моторов. Радиоуправляемые мультикоптеры становятся все более и более популярными для аэросъемки и изучения земли. Не так давно появившееся направление — гонки на коптерах (или на дронах или Drone Racing) — коптеры используются как для соревнований по фристайлу, так и в гонгах.
Видов мультикоптеров очень много. В основном они отличаются числом используемых моторов, например коптер с тремя моторами называется трикоптер, а конфигурация может обозначаться как Y3.
Число моторов и их расположение влияют на характеристики полета. Например, чем больше моторов, тем больше подъемная сила, т.е. вы сможете перенести более тяжелый груз. Большее число моторов также значит бОльшую надежность, в случае отказа одного из них. Недостаток — снижение энергоэффективности и увеличение стоимости (из-за покупки моторов и сопутствующих комплектующих).
Бикоптеры — коптеры с 2 моторами
У бикоптеров 2 мотора, которые могут поворачиваться серво машинками. Они похожи на ганшип из фильма Аватар. Вот подобный пример:

Бикоптеры — возможно самая дешевая конфигурация среди всех видов, потому как требуется всего 2 мотора и 2 сервы, но это самая сложная платформа в плане стабилизации полета. Подъемная сила минимальна, т.к. всего 2 мотора.
Бикоптеры не очень популярны, и информации о них не много.
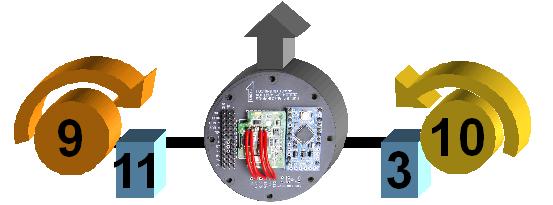
Трикоптеры — коптеры с 3 моторами
У трикоптеров моторы располагаются в форме буквы Y, лучи расположены под углом 120 градусов относительно друг друга. Иногда они бывают в форме буквы «Т». Два винта на переднем луче вращаются в разных направлениях, чтобы компенсировать момент вращения друг друга. Задний мотор может отклоняться в сторону при помощи сервы, это дает возможность менять курс.
Довольно популярная и дешевая конфигурация, т.к. требуется всего 3 мотора, несмотря на то что, дополнительно требуется серва (но она обычно дешевле бесколлекторного мотора). Вообще говоря, трикоптер менее стабилен, чем коптеры с другим количеством моторов, и не так надежен, из-за того, что серву легко сломать при авариях. Хоббистам сложнее его собирать из-за поворотного механизма.
Трикоптеры лучше всех управляются по курсу. Когда квадрокоптеру или гексакоптеру нужно развернуться, они замедляют половину моторов, и разгоняют другую половину. Если коптер уже летит на полной скорости (газ 100%), то ему придется снизить скорость чтобы развернуться. Трикоптеры используют сервы для разворота, так что они меньше теряют тяги в этом случае.
Моторов все еще мало, так что и поднимают они не много.
Квадрокоптеры — 4 мотора
У квадрокоптеров 4 мотора на симметричной раме. Для конфигурации X4 лучи находятся под углом 90 градусов. Два мотора вращаются по часовой стрелке (CW), два — против часовой стрелки (CCW), это нужно для компенсации вращения. Квадрокоптеры — наиболее популярная конфигурация среди всех коптеров.

Есть 2 основные конфигурации квадриков: «Х» и «+». Вариант «Х» более популярен, потому что винты не попадают в кадр (в случае FPV полетов и аэрофотосъемки). Некоторые предпочитают «+», т.к. этот вариант интуитивно понятнее и больше похож на самолет. Кроме того, легче определить ориентацию аппарата.

Есть еще одна конфигурация это «H», она позволяет разместить камеру на раме сместив ее вперед, чтобы винты не попадали в кадр. Споры о том, что лучше «X» или «H», наверное, никогда не закончатся.
Y4 — тоже 4 мотора
Выглядит как трикоптер, но без хвостовой сервомашинки. Два обычных винта спереди, и два соосно расположенных мотора сзади, на одном луче. Механически проще чем трикоптер, т.к. нет поворотного механизма.

Весят примерно как трикоптеры, но могут поднимать немного больше. Кроме того, они более надежны чем трикоптеры, т.к. нет сервомашинки.
VTail и ATail — 4 мотора
VTail и ATail — по сути это квадрокоптеры, у которых передние моторы расположены на обычных лучах, а задние 2 мотора расположены рядом друг с другом под некоторым углом. Еще можно сказать, что это смесь трикоптера и квадрокоптера и Y4.

Не очень популярный конфиг, т.к. подъемная сила меньше (из-за взаимного влияния хвостовых моторов). Однако они выглядят офигенно и с визуальным определением ориентации аппарата нет проблем.
Пентакоптер — 5 моторов
Информации о них почти нет, мало кто их собирает.
Единственное достоинство — между передними лучами можно сделать угол побольше, чтобы лучи и винты не попадали в кадр. Вот пример сборки пентакоптера (англ.)
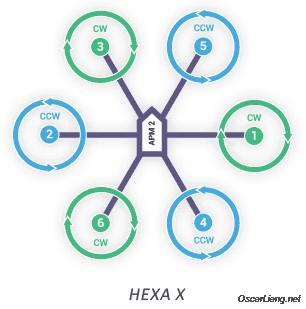
Гексакоптер — 6 моторов
У гексакоптеров 6 моторов, угол между лучами 60 градусов, три мотора CW и 3 мотора CCW.

Очень похожи на квадрокоптеры, но дают бОльшую подъемную силу, из-за большего числа моторов. Кроме того, они более надежны из-за избыточного числа моторов: если один мотор откажет, коптер все еще остается достаточно стабильным чтобы совершить мягкую посадку. Недостаток — большой размер и высока цена.
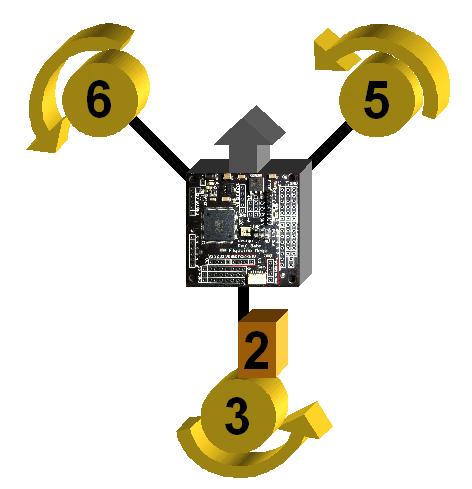
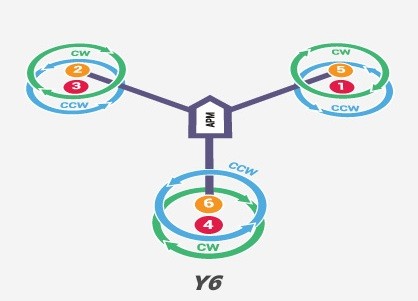
Y6 гексакоптер — 6 моторов
У Y6 имеется 6 моторов на раме в виде буквы Y. По сути это трикоптер, у которого на каждом луче расположено по 2 мотора, один над другим. Вместо сервы для поворота используются моторы CW и CCW на каждом луче.

Эти коптеры могут быть достаточно компактными (как трикоптеры), но с грузоподъемностью как у гексакоптеров. Однако Y6 менее эффективный конфиг из-за соосного расположения моторов.
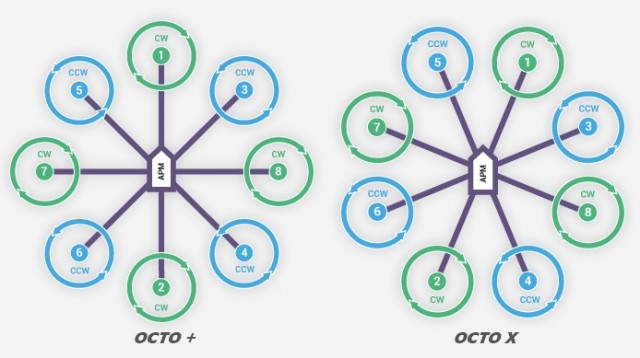
Октокоптер — 8 моторов
У октокоптеров 8 моторов в двух группах, 4 CW и 4 CCW.

Октокоптеры похожи на квадрокоптеры и гексакоптеры. Это типа проапгрейженной версии гексакоптеров: больше грузоподъемность, больше надежность.
Однако большее число моторов означает увеличение потребляемого тока, а значит придется таскать больше аккумуляторов. Это тоже достаточно затратно.
Они очень популярны для аэросъемки, для подъема тяжелых профессиональных камер.
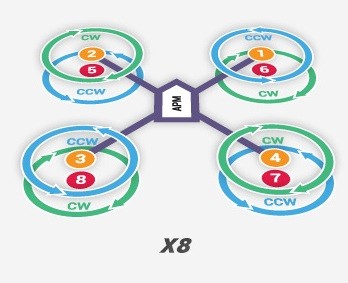
X8 — тоже 8 моторов
У этого конфига 8 моторов расположены на 4 лучах парами (CW и CCW). Характеристики похожи на X6.

Как выбрать правильную конфигурацию?
Зависит от того что вы хотите с коптером делать. Для гонок или фристайла, не ошибетесь если выберете квадрокоптер или трикоптер. Даже если и упадете, то менять нужно всего несколько винтов (а падать будете часть, особенно если вы летаете быстро или в непосредственной близости от препятствий). Для аэрофотосъемки вы можете выбрать квадрокоптер, если планируете снимать чем-то типа GoPro. Но если планируете тяжелые подвесы или хотите более стабильной платформы, то лучше рассмотреть гексакоптеры или даже октокоптеры.
Соосное расположение моторов
У конфигах Y6, X8, Y4 моторы расположены соосно. У такого расположения есть и плюсы, и минусы.
Преимущества соосного расположения моторов
- Если у вас больше 5 моторов, то появляется избыточность — если один мотор откажет, то летательный аппарат все еще будет стабилен и сможет безопасно сесть
- Компактность
- Возможность сделать складную раму, для большей мобильности
Недостатки
- Потеря 10-20% эффективности. По сути нижний мотор тянет уже разогнанный воздух, от этого теряется его эффективность
- Винты легче цепляют препятствия
- Сложно убрать винты из кадра, т.к. моторы расположены под лучами
- Сложно подобрать подходящие шасси
Статья написана в октябре 2013 года, последнее обновление: ноябрь 2016.