
В этой статье результаты тестирования более 20 курсовых FPV камер, а также подробное описание метода измерения задержки видеосигнала. Задержка видеосигнала очень сильно влияет на реакцию пилота, и это один из главных критериев выбора курсовой камеры.
Оригинал: FPV Camera Latency Testing
Измерение задержки сигнала FPV камер
Важно понять, что задержка видеосигнала — это не константа, она постоянно меняется и ограничена частотой кадров. Стабильное значение задержки тоже очень важно. Если камера имеет низкую среднюю задержку, но периодически она резко возрастает, то это очень плохо.
Другое FPV оборудование тоже может вносить задержку в сигнал, например: приемник, передатчик, экран, очки и т.д. Вот попытка измерить задержку вносимую видеопередатчиками и приемниками (англ).
Основные характеристики курсовых камер для миникоптеров я собрал в один список, так что вы можете сравнить их более детально.
Все данные получены в результате тестирования камер, которые у меня когда-либо были, пожалуйста используйте эти результаты только для сравнения камер между собой. Все результаты измерений в миллисекундах.
HD камеры:
| Задержка, макс. |
Мин. | Среднее (500 измерений) |
|
| Runcam 1 | 146 | 99 | 123 |
| Runcam 2 (купить на Banggood) | 64 | 27 | 45 |
| Runcam 3 Runcam 3S (купить на Banggood | Runcam) |
51 | 23 | 38 |
| Runcam Split V1, V2 (купить на Banggood) | 51 | 23 | 38 |
| Runcam Split Mini V1, V2 (купить на Banggood | Runcam) | 51 | 23 | 37 |
| GoPro Hero 3 Silver | 132 | 103 | 117 |
| Mobius | 138 | 101 | 120 |
| 808 Key Chain | 103 | 53 | 79 |
Измерение параметров HD камер делалось в режиме записи.
Методика измерения задержки видеосигнала
Тут я попробую объяснить всё простыми словами, если хотите обсудить детали, добро пожаловать на форум (англ).
Почему я использовал то, что использовал?
Многие обзорщики используют виртуальные цифровые часы или таймеры на iPAD или на смартфонах для измерения задержки сигнала курсовых камер или видеовыхода HD камер.
Их способ иногда работает, иногда нет. Я думаю, результаты довольно ненадежны из-за того, что камера и экран имеют небольшую кадровую частоту, возможно даже разные частоты, и тогда они часто не совпадают по фазе. Например, если всё оборудование работает с частотой 60 fps, тогда в результате может появиться ошибка до 16,7 мс. Это очень много, т.к., например, у Runcam Swift задержка сигнала составляет всего 30 мс.
При тестировании я стараюсь получить как можно больше результатов измерений (сейчас обычно делаю порядка 500 измерений каждой камеры со случайными паузами).

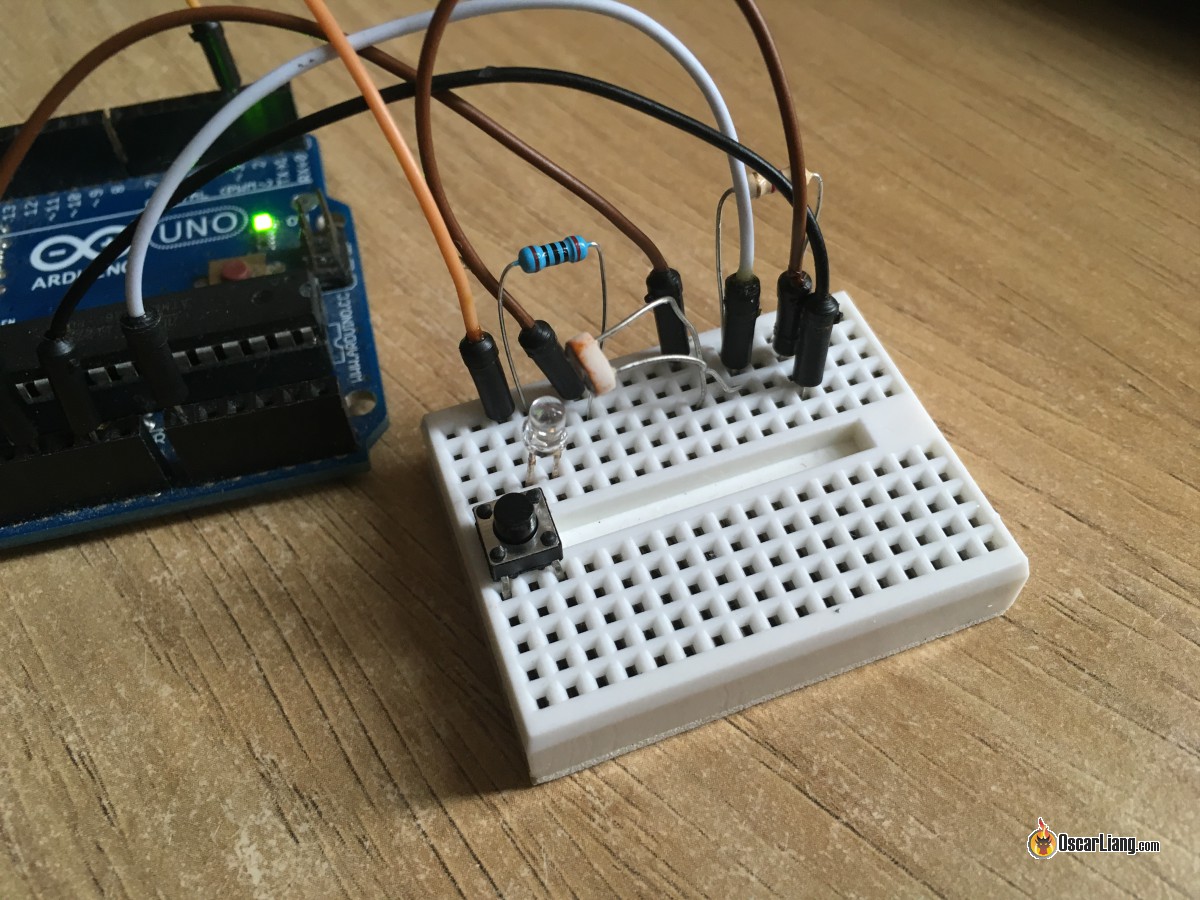
Примерная схема соединений
Как это работает?
В моем тестовом стенде, камера напрямую подключается к экрану. Перед камерой я ставлю светодиод, и периодически его включаю, от этого яркость изображения увеличивается. Перед экраном у меня фототранзистор, который и отслеживает изменение яркости. Разница во времени между включением светодиода и изменением яркости и есть задержка видеосигнала.
Однако, экран тоже может вносить задержку. Поэтому я и делаю так много измерений с разными интервалами, т.е. итоговый результат не будет зависеть от частот обновления экрана и кадровой частоты, он будет достоверным. Эти данные подходят для сравнения камер между собой и выбора камеры с минимальной задержкой сигнала.
Светодиод и фототранзистор подключены к Arduino UNO, так что время измеряется очень точно. Светодиод и фототранзитор тоже вносят задержку. Исходя из моих измерений она около 170 мкс, что очень мало по сравнению с результатами измерений, а значит этим можно пренебречь (на самом деле задержку вносит не светодиод, он может работать на гораздо более высоких частотах, а библиотеки Arduino для работы с портами ввода-вывода, прим. перев).
Камеру к экрану я подключаю напрямую, без видеопередатчика и приемника, чтобы избежать их влияния на результат.
Частота опроса фототранзистора — 10 кГц.
NTSC или PAL
У меня было предположение, что формат сигнала влияет на задержку (статья про отличия между PAL и NTSC, англ).
У NTSC 30 кадров в секунду, а у PAL — 25, но за счет черезстрочной развертки (каждый кадр разбивает на два полукадра, с четными и нечетными строками), получаем частоту обновления 60 Гц (16,7 мс) и 50 Гц (20 мс) соответственно. Так что, теоретически, у NTSC преимущество в 3 мс.
Я хотел убедиться, что NTSC быстрее PAL, и в этом плане очень помогла камера Eagle, у которой формат видеосигнала можно поменять в настройках. Так что я протестировал Eagle (CMOS) и Eagle 2 (CMOS) по два раза с PAL и NTSC.
Я выяснил, что:
- у камеры Eagle, минимальная задержка при использовании NTSC значительно ниже, чем у PAL; при этом средняя задержка только немного меньше; а разница между максимальными значениями едва заметна
- Дело не в камерах, задержка одинаковая для обоих форматов и видимо зависит от параметров кодирования в камерах
Похоже, что разное число кадров в секунду не всегда влияет на время задержки сигнала, но почему же в некоторых случаях у Eagle она разная?
Я протестировал и Runcam, они предположили, что разница в задержке может быть вызвана разными алгоритмами внутри камеры, при этом для разных форматов алгоритмы работают по-разному.
| Камера | NTSC/PAL | Макс. | Мин. | Среднее |
| Eagle | NTSC | 45 | 17 | 32 |
| PAL | 46 | 27 | 36.0 | |
| Eagle 2 | NTSC | 33 | 17 | 26 |
| PAL | 34 | 15 | 25 |
Я хотел бы протестировать большее количество камер с разными форматами, но все что у меня есть выдают только PAL и это нельзя изменить в настройках. В своих тестах я указываю результаты для PAL, т.к. именно этот формат сам лично использую.
Супер статья , расширяет угол понимания что куда-чево про fpv.
Я хочу собрать кит , стационарный манитор с записью на флешь через fpv , и переносной камерой на магните с опцией IR подсветкой .
Я штатовский дальнобойщики и тут в последний год очень обострилась проблема с паркойвкой , мест на тракстопах нету , а если есть то туда нужно под микроскопом парковаться , по этому нажна такая камера с быстрым отзывом , по WI-FI 2.4 можно только в столб въехать .
Почему нужна переносная камера ?, потому что рейдера меняю каждый день .