
Хочу показать вам сборку миника на раме Speed Addict 210 с наиболее популярной конфигурацией — моторы Cobra, Littlebee 20A, Naze32 Rev6, SBUS.
Если вы пропустили мой обзор рамы Speed Addict 210, то вначале прочтите его.
Список комплектующих:
- Рама Speed addict 210 (включая PDB)
Naze32 Rev6XRacer F3- Приемник X4R-SB
- Регуляторы Littlebee 20A
- Моторы Cobra 2204 2300KV
- Винты Gemfan 5045 (не Bullnose)
- Видео передатчик Hawkeye 200mW
- Micro MinimOSD
- Курсовая камера HS1177
Вначале я собирался использовать полетный контроллер FPVModel X-Racer F3, но случайно повредил контакты идущие к пищалке, а также диод по питанию 5В от USB. Пока ждал замены пришлось использовать Naze Rev6, потому что хотел использовать SBUS безо всяких модификаций.
Видео полета на этом квадрике:
Начинаем сборку
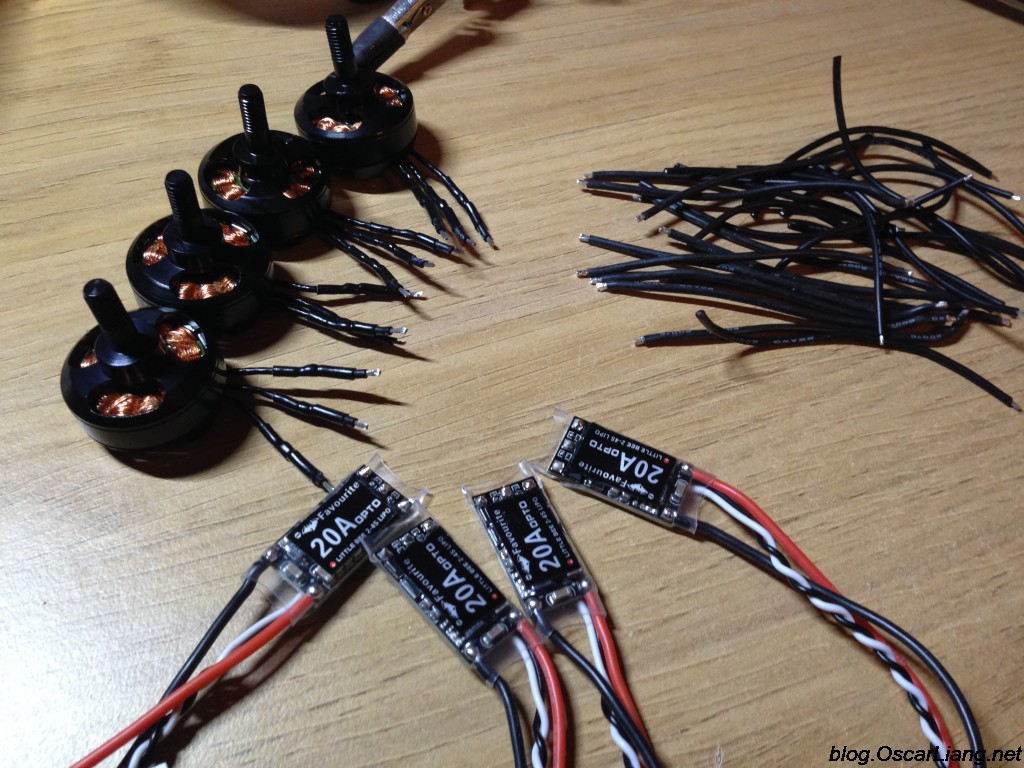
Моторы и регуляторы
Чтобы сэкономить вес и сделать сборку аккуратной, я удалил все ненужные кабели и припаял провода от моторов напрямую к регуляторам.
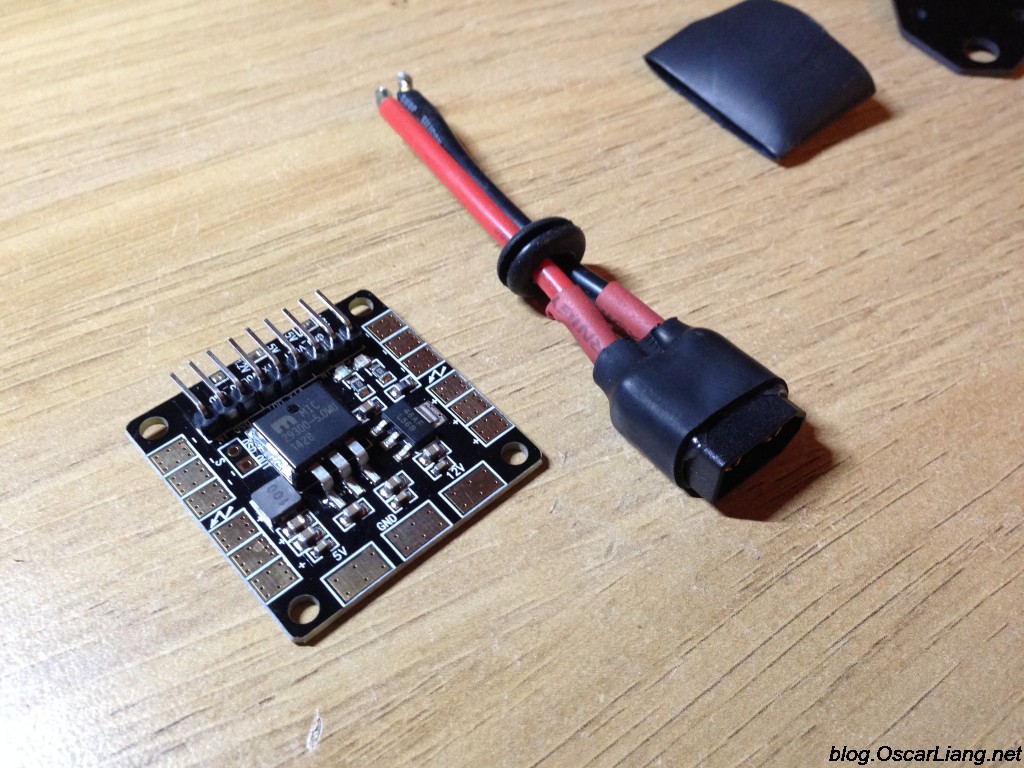
PDB и разъем XT60
Я прикинул на сколько длинным должен быть кабель питания с разъемом XT60 и убедился что он помещается в раму прежде чем припаивать (это важно).
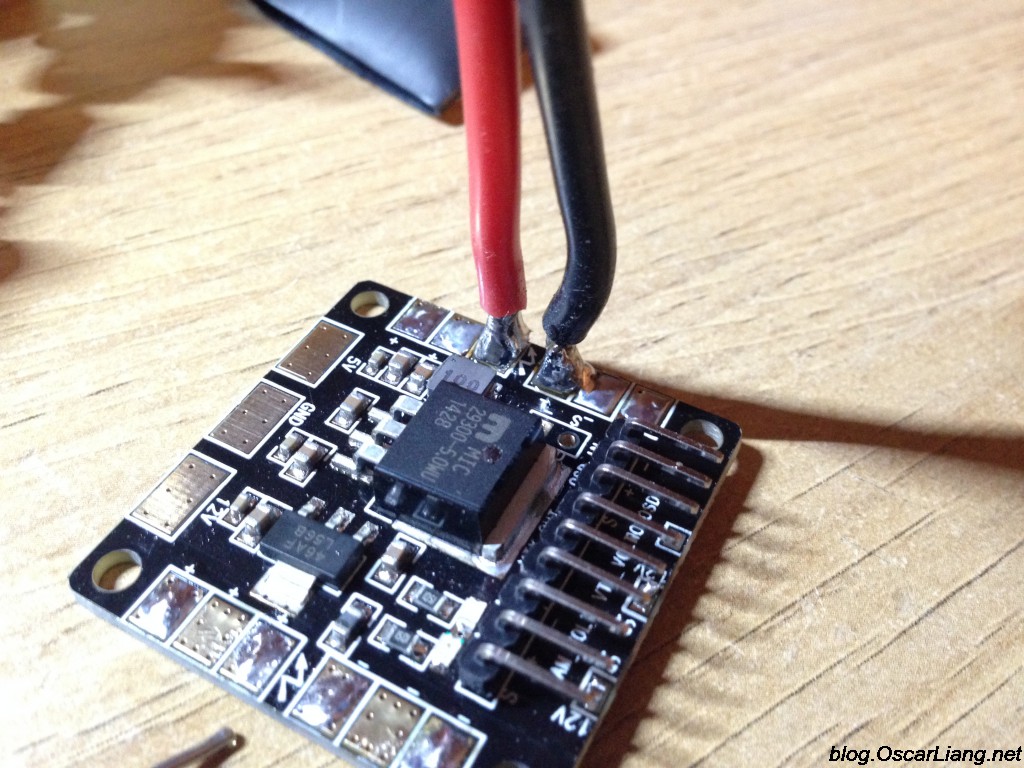
Способ пайки отличается от того к которому мы привыкли. Это вызвано ограниченным пространством в раме, кабель должен быть припаян вертикально. На самом деле это проще чем кажется.
Винтики для крепления моторов идут в комплекте с рамой. Это такие же легкие алюминиевые винтики (голубого цвета) как и в самой раме. Для экономии веса я использовал всего 2 винтика (немного рисковано).

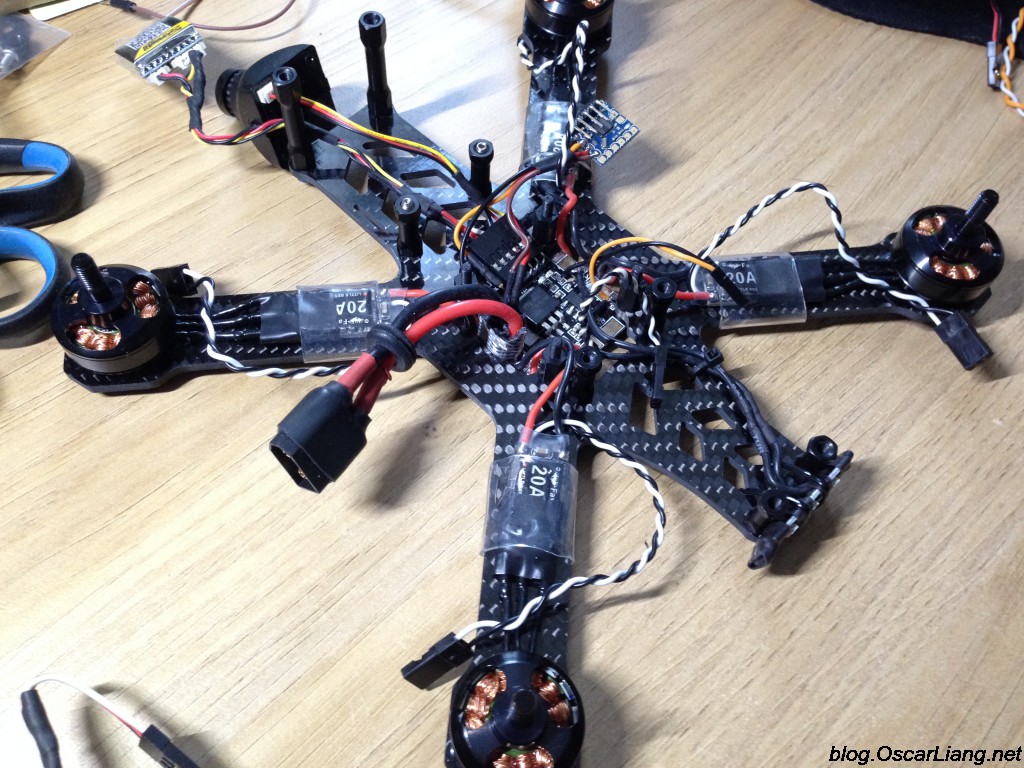
Разместил моторы, регуляторы и PDB на раме.

Кабели питания я провел через прорези и припаял снизу PDB.
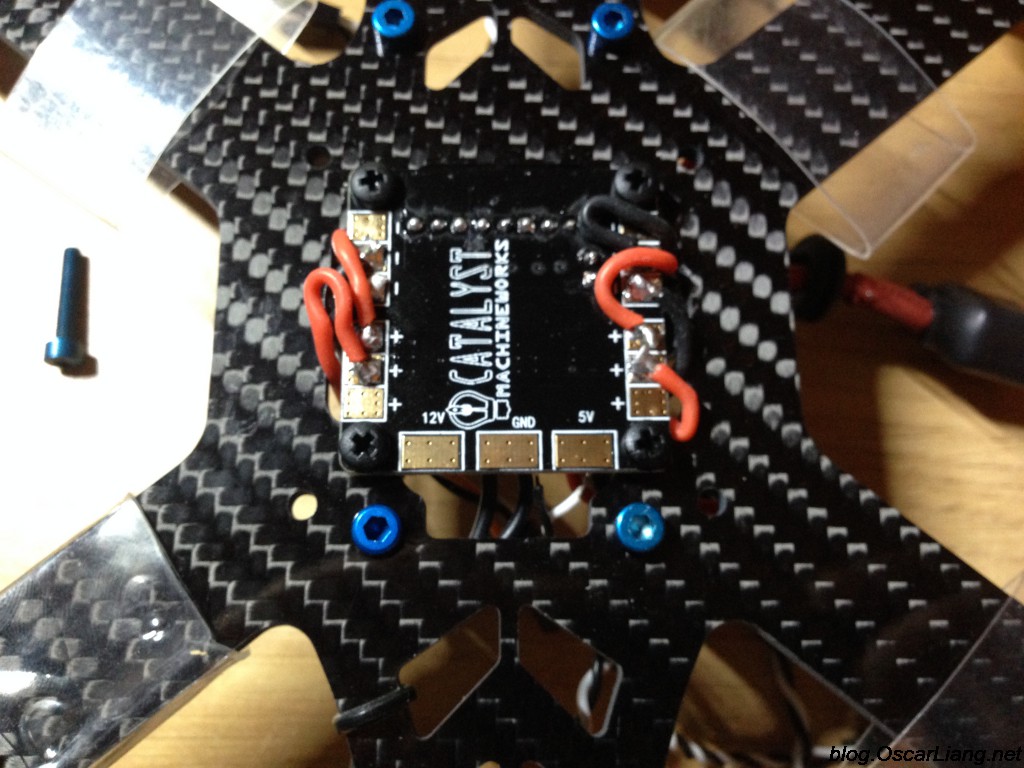
Как только закончил с этим — прикрутил защиту днища.

FPV оборудование: камера, OSD, видео передатчик
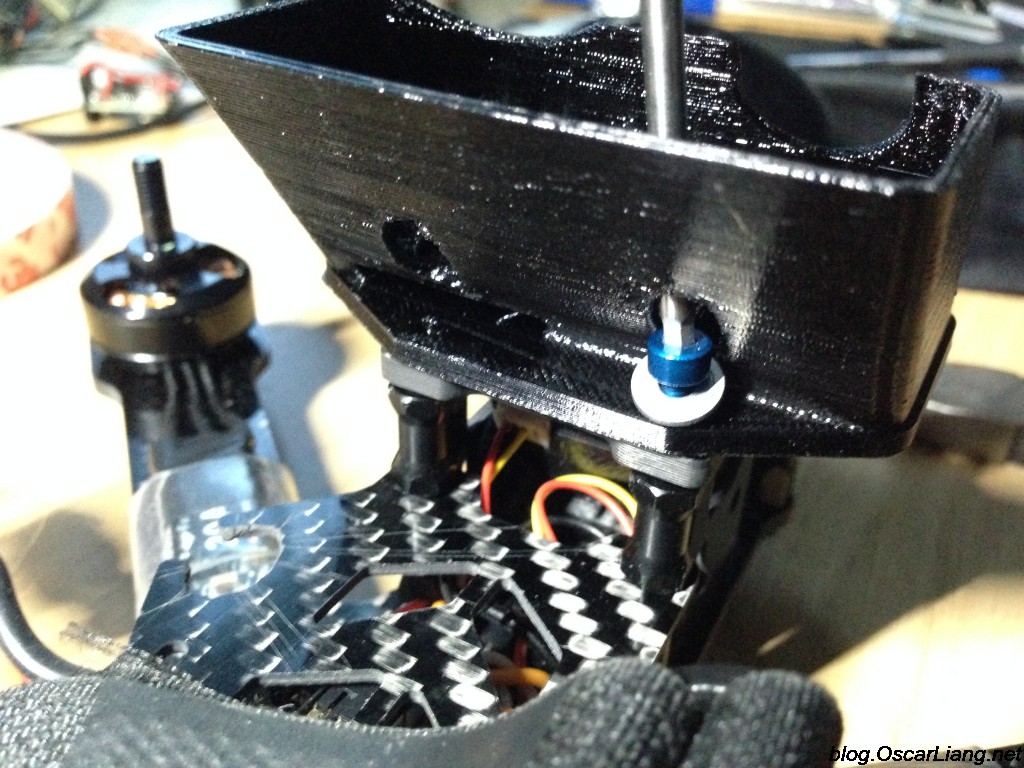
Крепление курсовой камеры идет в комплекте с рамой, мне кажется оно специально разработано именно для этой камеры. Я открутил заднюю пластину, приложил деталь напечатанную на 3D принтере и закрутил серебристыми винтиками из комплекта.

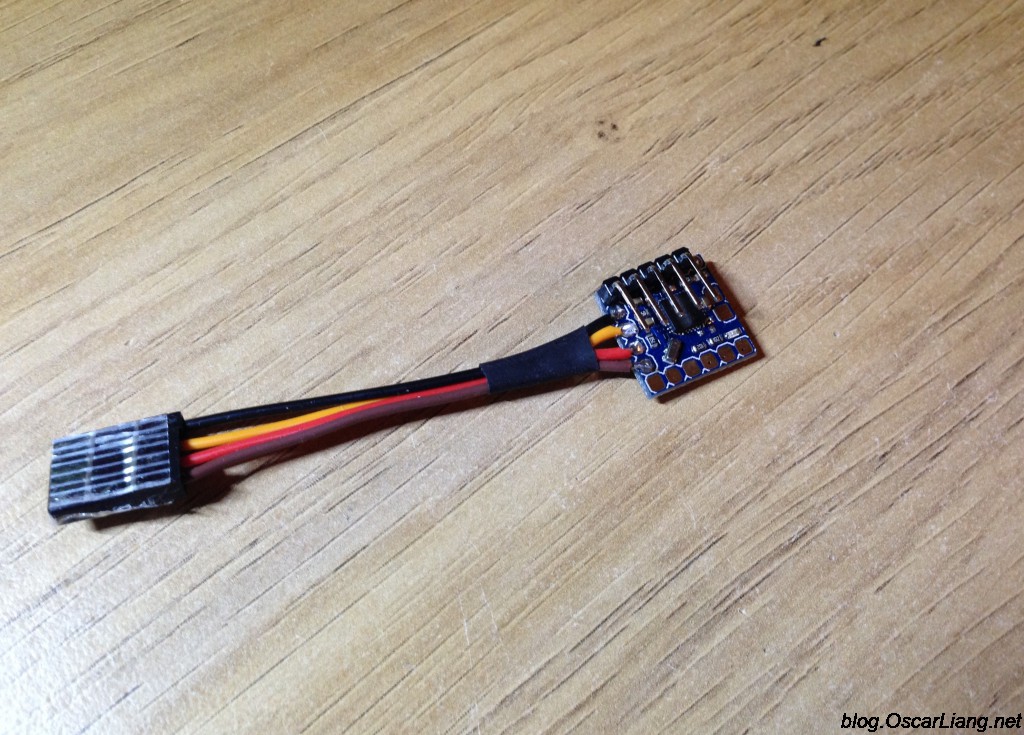
MinimOSD получает все данные с полетного контроллера, так что к ней припаивается минимум проводов. Для видео входа и видео выхода я использовал серво разъемы, их можно просто воткнуть в PDB, для TX, RX, 5В и земли я использовал штыревые разъемы. Еще один дополнительный контакт это DTR — он нужен для прошивки MinimOSD.
Для моего видеопередатчика Hawkeye 200mW я нашел идеальное место. Думаю отлично все совпало.

Перед подключением всего этого я проверил питание 5В и 12В на PDB при помощи мультиметра, убедился, что выдаются требуемые напряжения. Затем подключил все FPV оборудование для проверки.
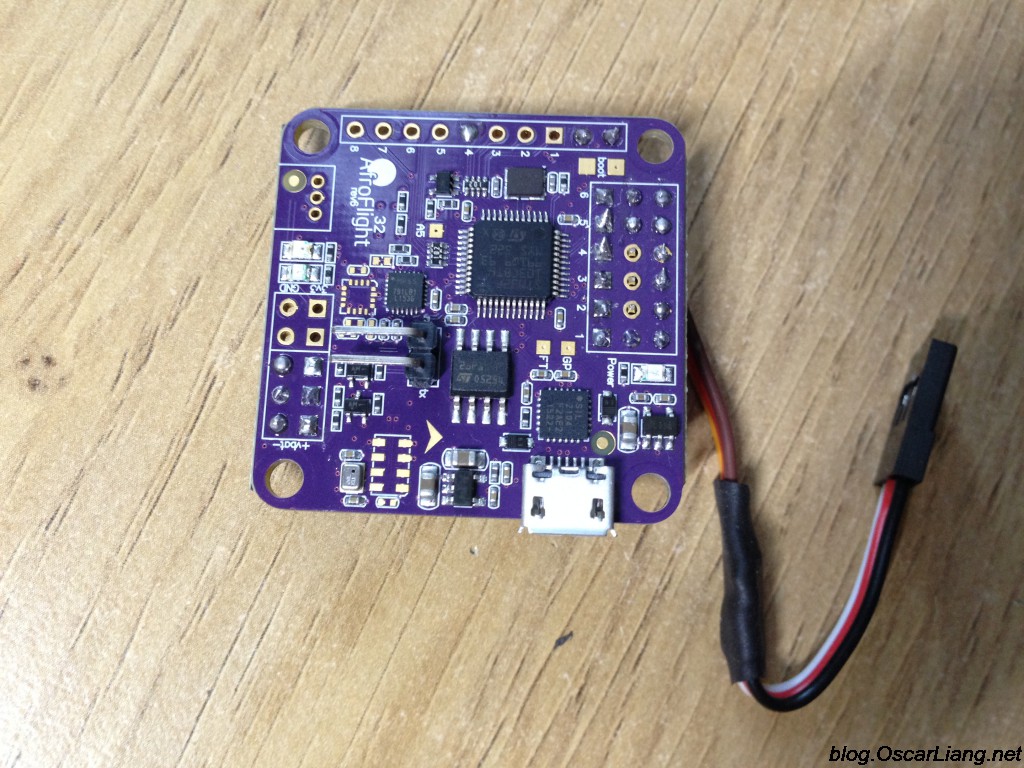
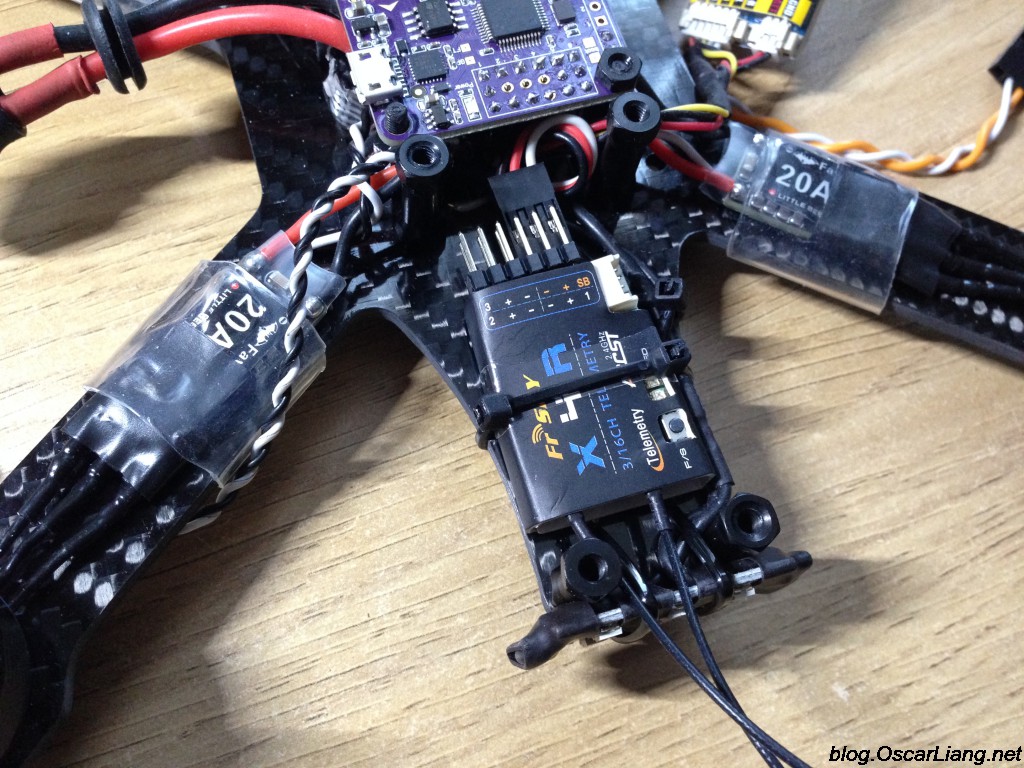
Полетный контроллер
И снова из-за ограниченного пространства, контакты к моторам нужно припаивать снизу платы. Некоторые предпочитают припаивать ESC прямо к контроллеру (англ.), не только из-за веса. Решать вам.
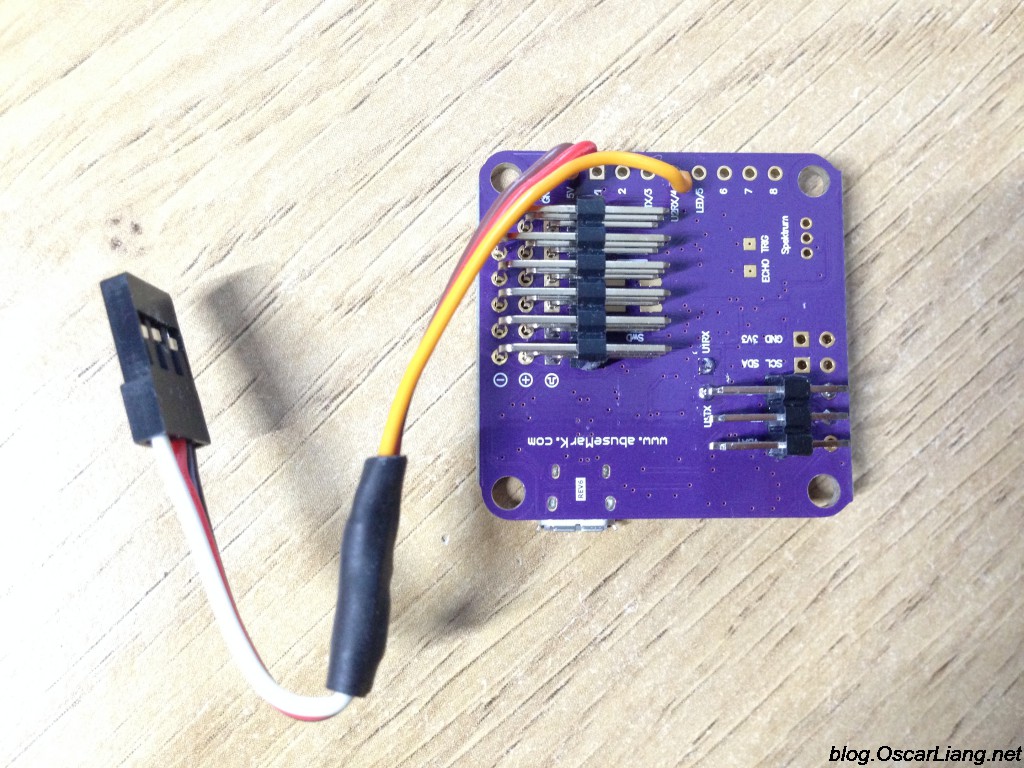
Вход SBUS я не стал припаивать, вместо этого использовал серво разъем. Это проще потому как SBUS использует pin 4, у которого рядом нет питания и земли.
Светодиоды
Если вы собираетесь гонять с другими пилотами, то нужно установить какие-нибудь светодиоды.
Я настоятельно рекомендую простые одноцветные светодиодные полоски. В комплект входит 3 полоски (всего $1.5), все разных цветов (белый, синий, зеленый, красный). Важно то, что их можно запитывать напрямую от аккумулятора 4S! Это сильно упрощает проводку. Лично я их использую на всех своих квадриках.
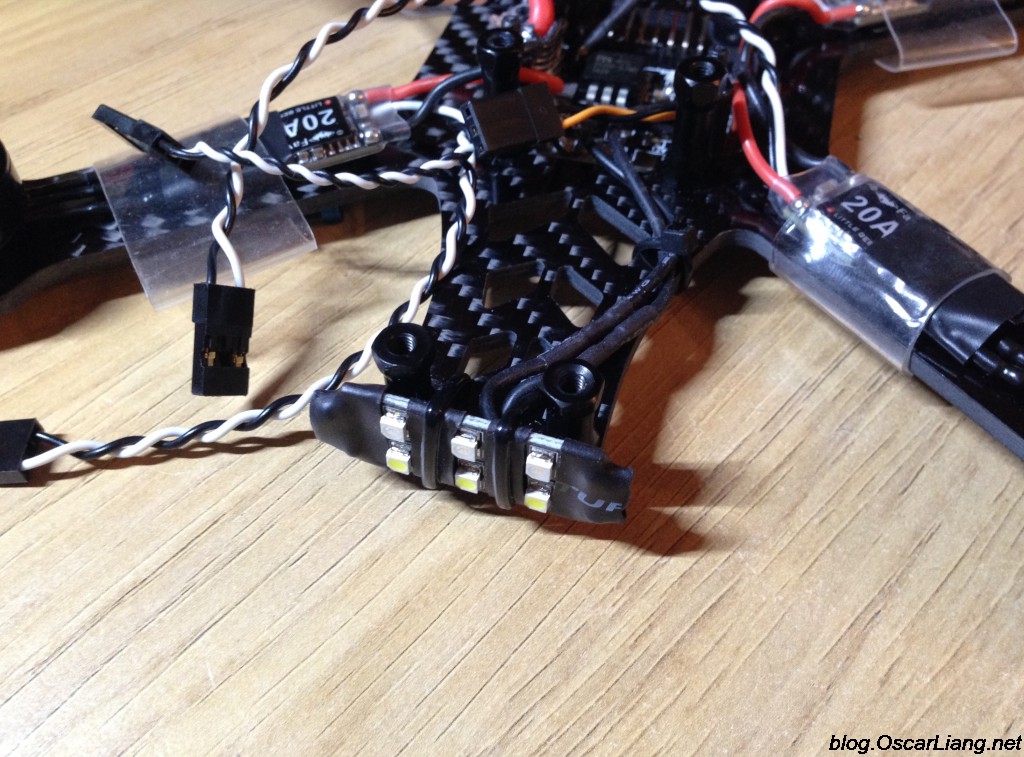

Они очень яркие.
Приемник
Место рекомендованное для размещения вашего приемника типа X4R-SB или D4R-II.
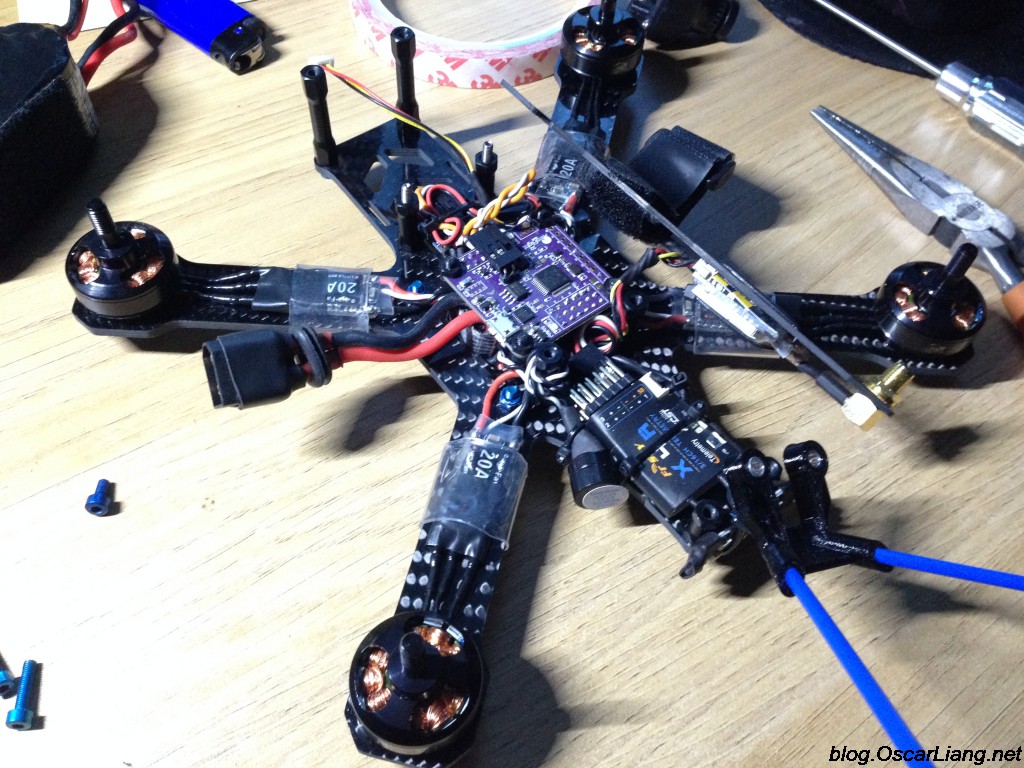
Как я и говорил в обзоре, синие пластиковые трубки слишком длинные, из-за них сложно разместить коптер в чехле и в рюкзаке. Так что я решил укоротить их, излишки антенны загнул и закрепил при помощи термоусадки.
Я, наверное, оставил бы их длинными, для улучшения качества приема и уменьшения шанса, что карбоновая рама экранирует сигнал. Но после пары полетов никаких проблем с приемом я не заметил.

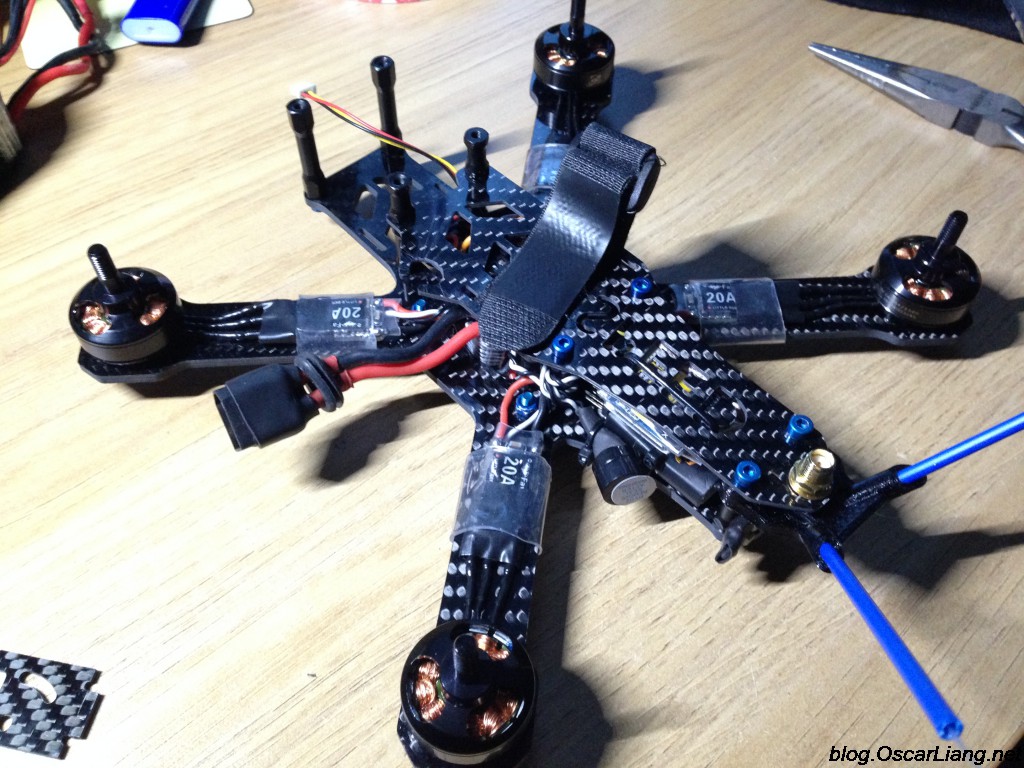
Почти готово!
Собираем все внутренности, теперь пора установить верхнюю пластину.
Ставим курсовую камеру.
Мне действительно очень понравился способ установки камеры. Угол наклона можно менять руками. Как только вы определили необходимое значение, его можно зафиксировать 2 винтами. В моем случае трения между камерой и рамой достаточно для удержания угла без затягивания винтов. При этом я все еще могу менять угол руками.

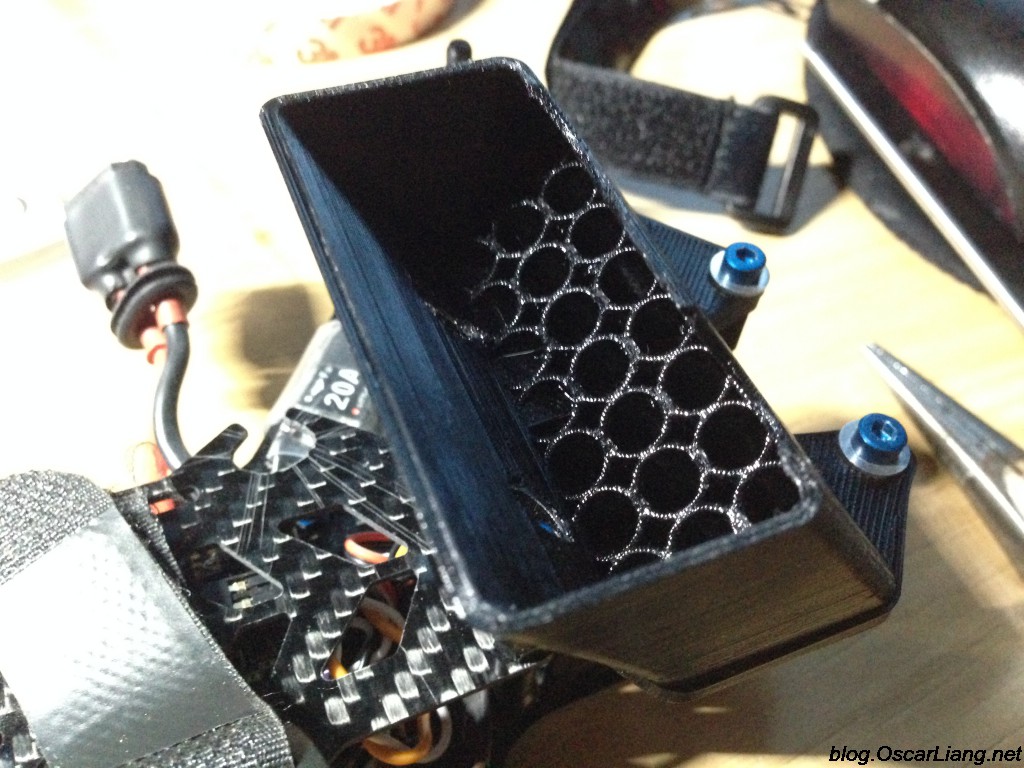
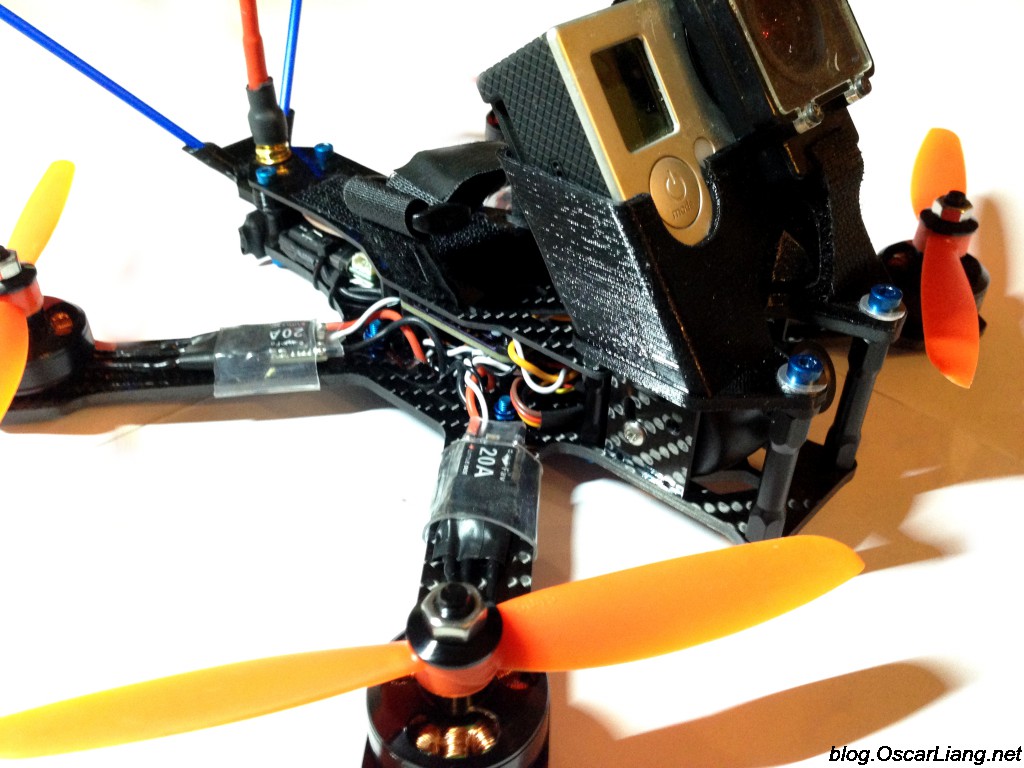
Крепление GoPro
В самом конце размещаем крепление goPro на раме. Очень продуманный дизайн и отличная ячеистая виброизоляция.
Я планирую использовать Gemfan 5045 не bullnose на этом коптере. Немного меньше тяги чем при использовании bullnose или трехлопастных, но бОльшая эффективность дает бОльшее время полета 🙂 Хотя основная причина в том, что у меня слишком много таких винтов и я не знаю что с ними делать 🙂

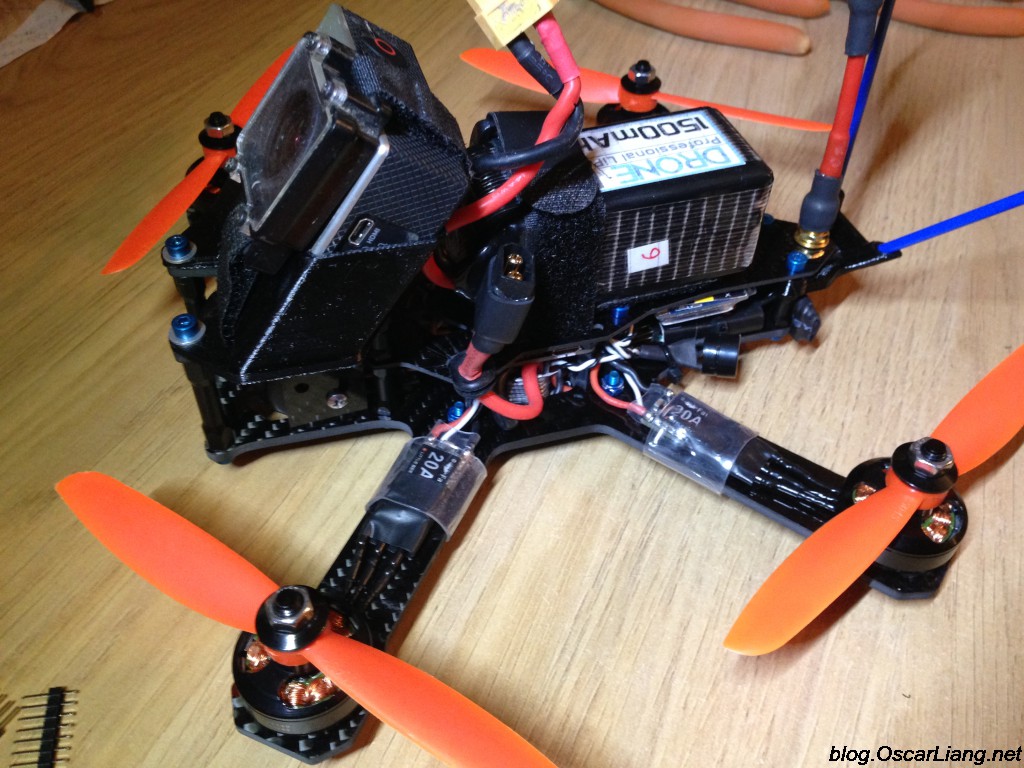
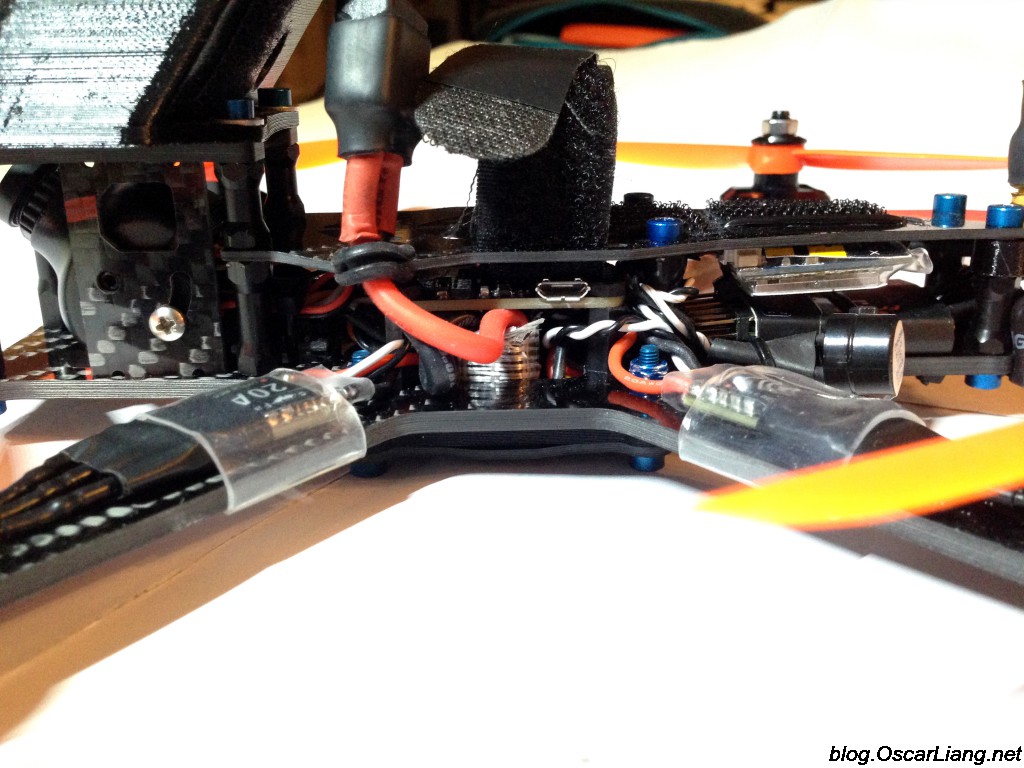
Сборка окончена
Видите как плотно все размещено, ни капли свободного места.
Вес 350 грамм без аккумулятора и GoPro. Вместе с Lipo и GoPro вес около 590 грамм.

Мысли после сборки:
- Видео инструкция от Catalyst Machineworks была очень полезной, просмотрите ее перед началом сборки
- Будьте внимательны при установке разъема XT60, вначале продумаете все
- Если вы используете штыревые разъемы на полетном контроллере, то учтите, что они должны быть снизу и убедитесь что для них есть достаточно места. Возможно вы решите припаять провода напрямую
- GoPro легко бьется при падениях, так что я подумываю о какой-нибудь защите для нее. Я обсудил этот вопрос с Нейлом (дизайнер рамы), он мне сказал, что у них еще не было случаев повреждения GoPro, т.к. TPU (Thermoplastic polyurethane) при авариях гнется, поэтому удар на GoPro не передается. Однако он согласился сделать защищенное крепление в ближайшем будущем
- Было бы не плохо сместить немного назад ремешок крепления аккумулятора, т.к. аккум смещается назад при установленной спереди goPro
- Думаю, что угол установки GoPro слишком большой. Мне нравятся свободные полеты, так что обычно я не летаю очень быстро. Перед покупкой убедитесь, что угол установки камеры вам подходит. У меня был угол 35 градусов. Я бы предпочел градусов на 5-10 поменьше. При использовании GoPro Superview требуемый угол меньше чем у курсовой (FPV) камеры
Тестовый полет и настройка
Мой первый полет на этом квадрике, еще есть что настраивать. Еще я выяснил, что этот коптер несколько сложнее настраивать чем все предыдущие. Напоминаю, что вначале я использовал Naze32 Rev6 c Betaflight, так что возможно причина именно в этом.
В логах Blackbox видны сильные вибрации, я думаю многие увлекающиеся коптерами уже выяснили, что MPU6500 выдает шумные данные с гироскопа, это делает настройку квадрика более сложной и заставляет использовать низкие значения ПИД коэффициентов (большинство полетных контроллеров используют MPU6000 или MPU6050, и только Rev6 и LUX F3 используют 6500).
Первоначально я использовал частоту 2кГц, но не смог побороть вибрации, так что пришлось вернуться к частоте 1кГц и вот что из этого вышло: описание на форуме (англ.)
Возможно также виновата 3-х мм нижняя пластина, например она недостаточно жесткая, Нейл вышлет мне 4х мм пластину для сравнения.
В любом случае, я хочу избавиться от Rev6 и установить XRacer F3 на этот квадрик.
Полетный контроллер XRacer F3 офигенен!!!
(обновление от 27 фев. 2016 года) Я заменил дерьмовый Rev6! XRacer F3 идеален во всем кроме VBat, в настоящее время я использую MinimOSD для определения напряжение, но в остальном все отлично!