
В этом руководстве я покажу вам как и зачем настраивать GPS в Betaflight для квадрокоптеров. Ещё я покажу топовые GPS модули.
Оригинал: How to Setup GPS in Betaflight / Mini Quad
Зачем нужен GPS на квадрокоптере?
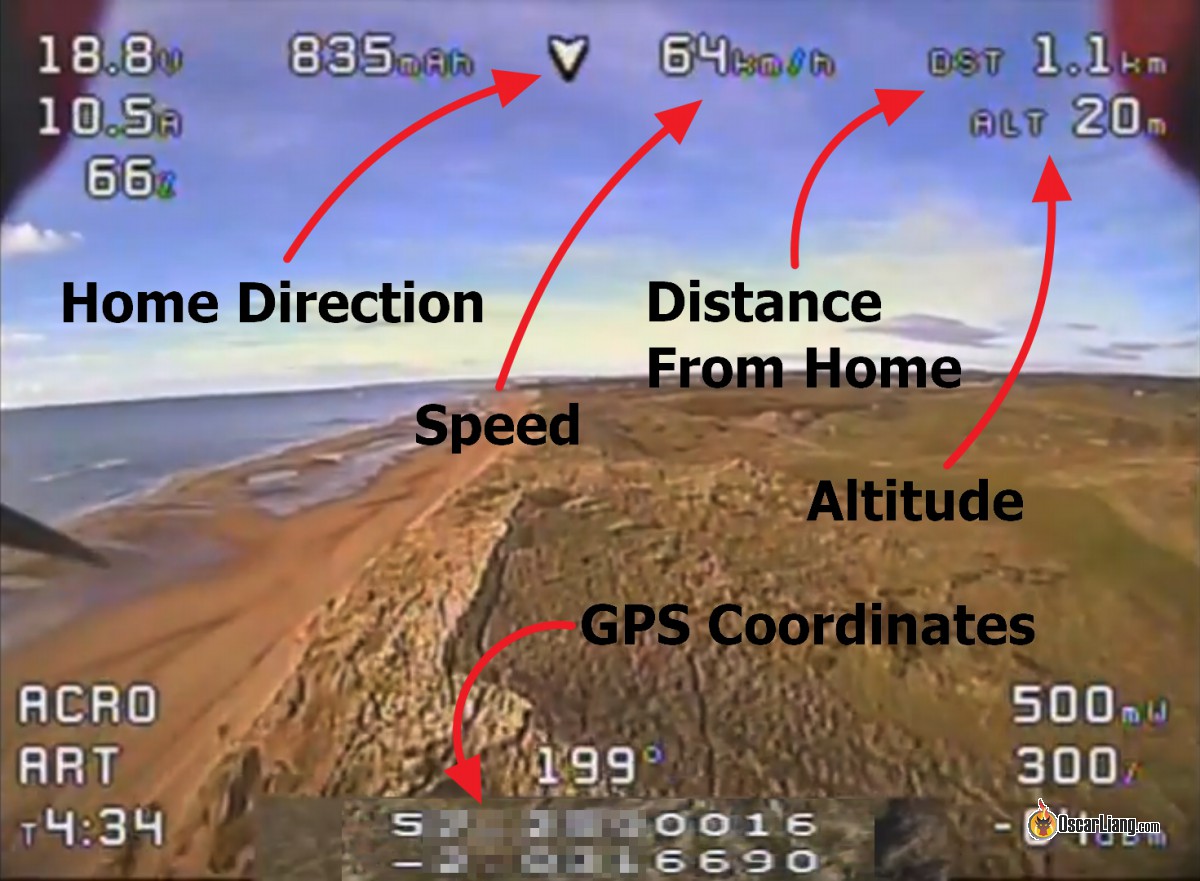
При помощи OSD можно отобразить довольно много полезной информации, включая текущие координаты (широту и долготу), расстояние до дома, скорость, высоту и направление в сторону дома. Последние известные GPS координаты могут помощь вам найти коптер в случае аварии.
Если вы используете телеметрию с приемников типа X4R или R-XSR, то даже сможете посылать в реальном времени координаты на Taranis. Это еще больше упрощает поиск потерянного коптера.
Для функций «возврат домой» (Return to Home, RTH) и «удержание позиции» (Position Hold) обязательно нужен GPS модуль. В новой версии Betaflight есть режим «Rescue Mode» (режим спасения), который очень похож на RTH. Этот режим активируется при потере сигнала (или в ручном режиме) и позволяет вернуть коптер к точке старта.
Какой GPS модуль лучше купить?
Из-за ограничений на размер и вес, брать нужно компактный модуль. Рекомендую BN-220, т.к. он работает что называется «прямо из коробки».
Ещё один вариант — BN-880, он крупнее, но зато имеет встроенный компас. Этот модуль популярен на более крупных моделях.
Важно выбрать модель с новым чипом — M8N, а не со старым типа M7N. M8N быстрее найдет спутники, т.к. может одновременно использовать две системы, GPS/ГЛОНАСС. Благодаря этому число видимых спутников практически удваивается.
Большинство модулей продается уже настроенными, достаточно просто подключить их к полетному контроллеру. Однако, если вы хотите «поиграться» с настройками, то можете подключить плату к компьютеру через USB-UART адаптер и воспользоваться программой U-Center
Аппаратные требования
Если вы используете прошивку Betaflight, тогда потребуется ПК на F4 или F7. Из-за недостатка памяти в платах на F3 этот функционал на них недоступен (смотрите в сторону прошивки iNAV, прим. перев).
Соединяем GPS и полетный контроллер
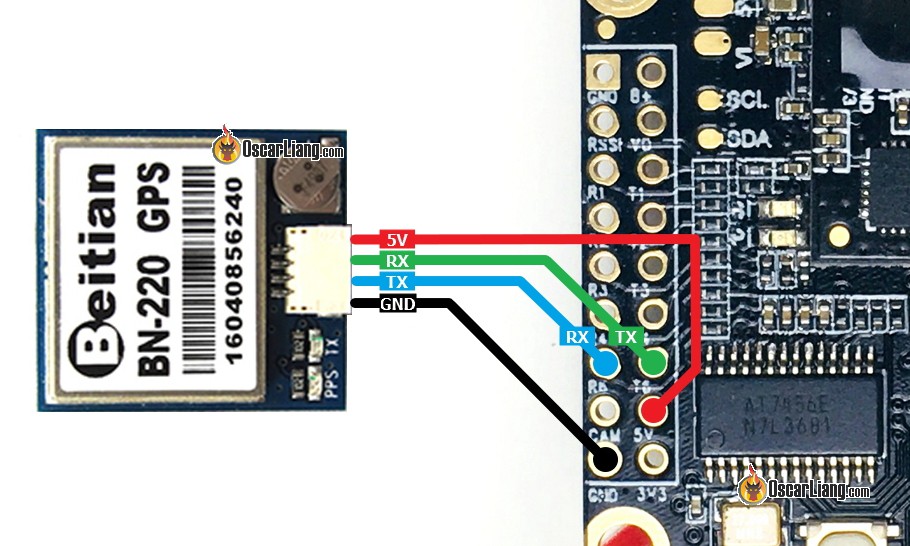
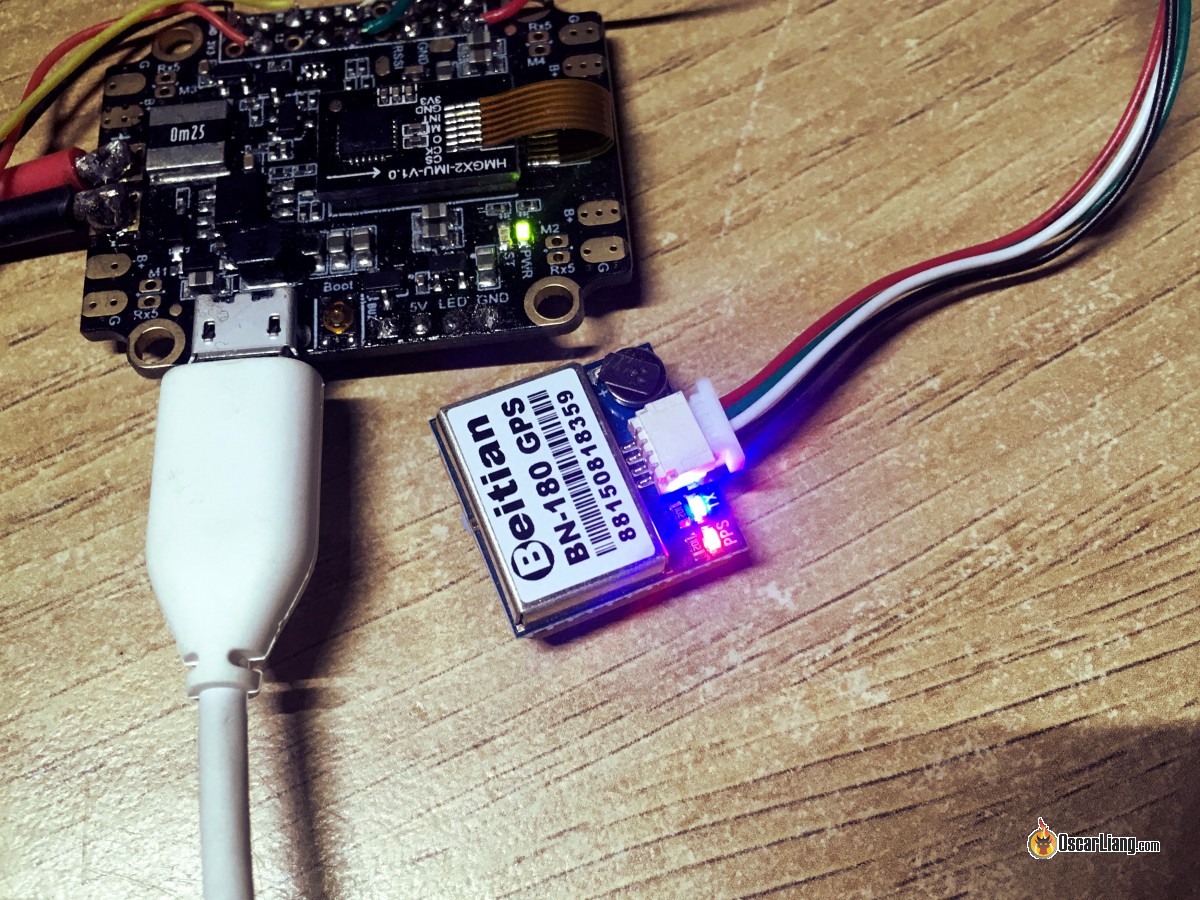
Подключение GPS — очень простой процесс, просто подайте питание 5 вольт и подключите к последовательному порту (RX к TX и TX к RX).
Настраиваем GPS в Betaflight
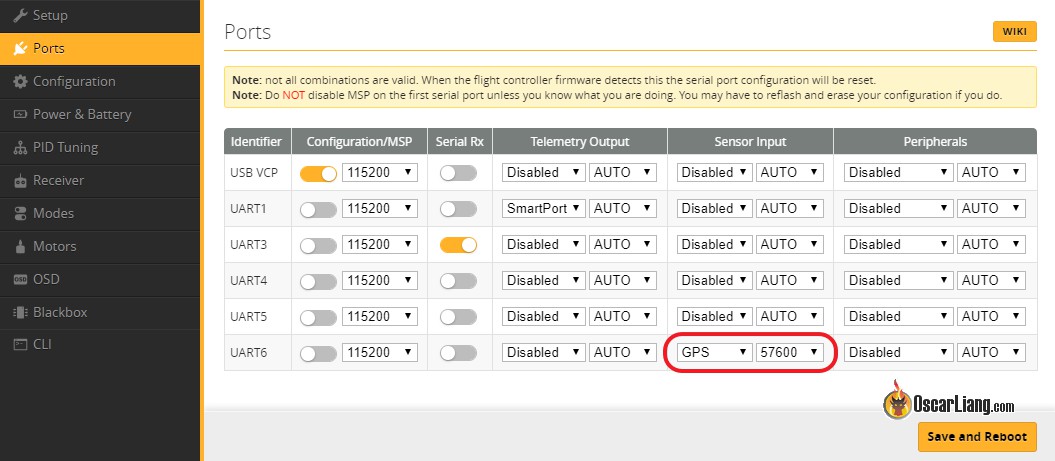
На вкладке Ports в столбце Sensor Input выбираем GPS. В моем примере это UART6. Скорость оставляем по умолчанию (57600).
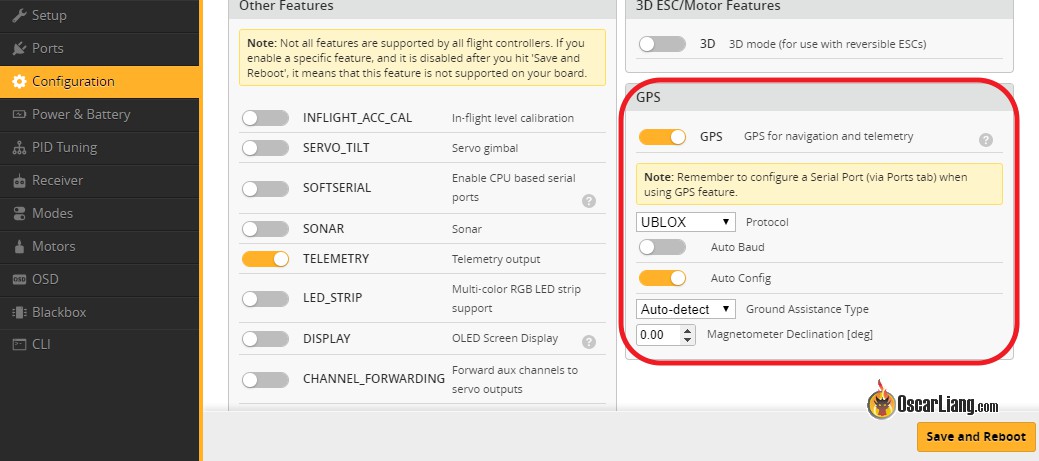
Переходим на вкладку Configuration:
- Включаем GPS
- Выбираем протокол UBLOX или NMEA. Обычно это UBLOX, старые модули работают с NMEA
- Включаем автонастройку (Auto Config)
- Сохраняем настройки и перезагружаемся (кнопка Save and Reboot)
Если все подключено и настроено правильно, то на вкладке Setup вы увидите блок данных GPS.
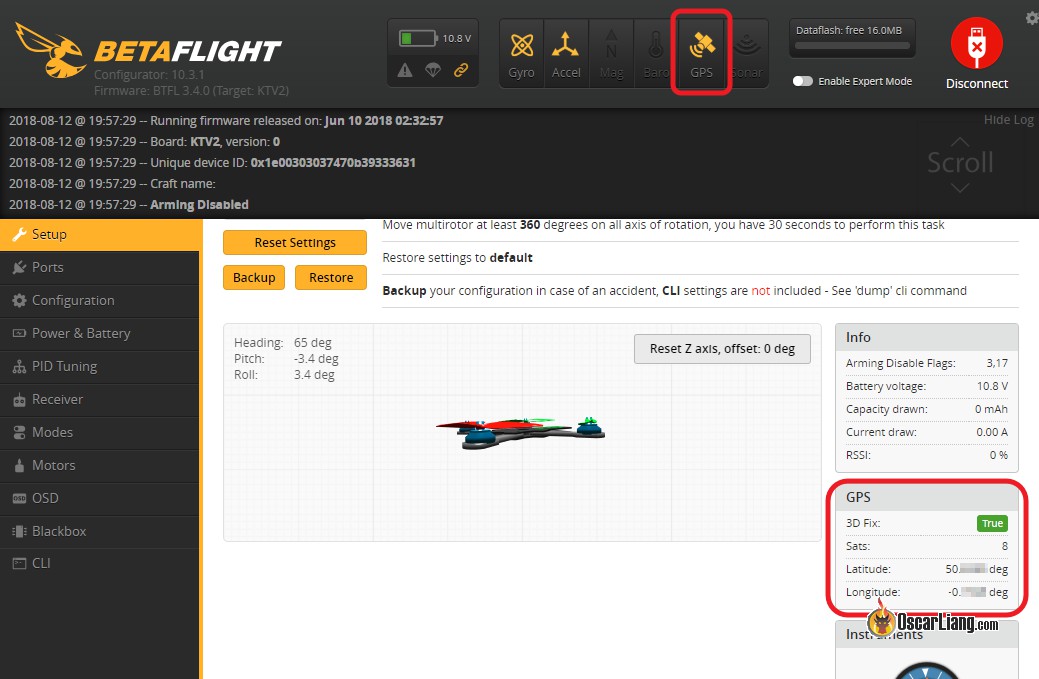
Теперь нужно подождать пока найдутся спутники (3D fix, т.е. минимум 4 спутника). Этот процесс может занять несколько минут.
Когда он закончится, на модуле BN-220 замигает красный светодиод (вместе с мигающим синим, который означает наличие связи). Теперь в разделе GPS можно будет увидеть дополнительную информацию: 3D Fix = True, и текущие координаты.
Чтобы спутники нашлись быстрее, нужно выйти на улицу, или перенести модуль как можно ближе к окну и направить верхнюю часть (антенну) на небо.
Есть два способа отображения данных GPS: через Betaflight OSD и через телеметрию в аппаратуре управления.
Если вы не знакомы с Betaflight OSD, тогда читайте наше руководство. На экране можно показать: координаты; расстояние и направление в сторону дома, ну и многое другое.
Еще одна полезная вещь — можно настроить Taranis на отображение текущих координат коптера получаемых через телеметрию (SmartPort или CrossFire). Если вы упадете, то на экране будете видеть последние известные координаты модели.
Для этого включите коптер, в Таранисе перейдите на страницу телеметрии и выберите «Discover new sensors» (найти новые датчики). После этого должны появиться новые данные, включая координаты GPS.
Тестирование
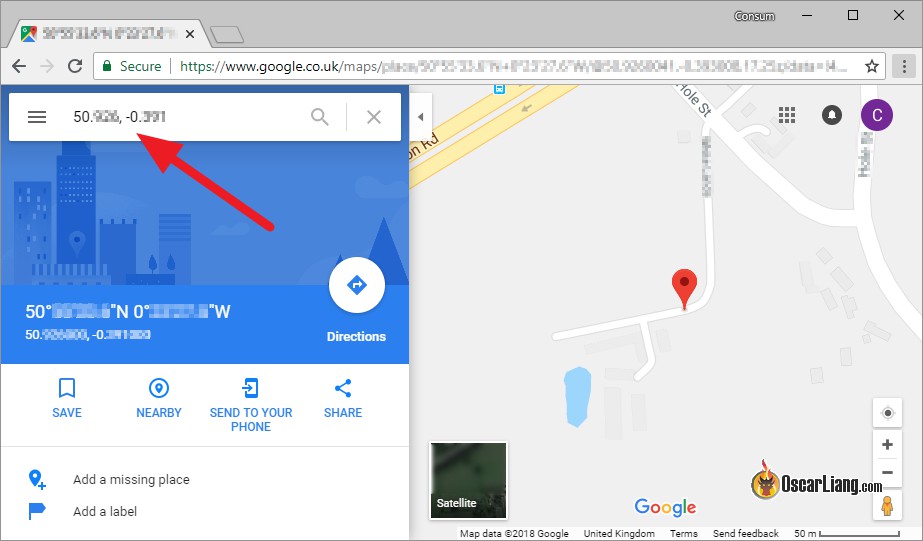
Вы наверняка захотите тщательно проверить GPS перед дальним полетом. Первое, что я бы проверил — корректность выдаваемых координат. Просто вбиваем их в Google Maps и смотрим что показывается.
По возможности проделайте это в нескольких местах.
Где лучше всего установить GPS модуль?
Убедитесь, что GPS модуль ничем не затеняется. Расположите его сверху коптера подальше от антенны видеопередатчика. Не забудьте сделать для него длинные провода. Вот несколько вариантов установки:
Поверх GoPro.

Поверх аккумулятора.
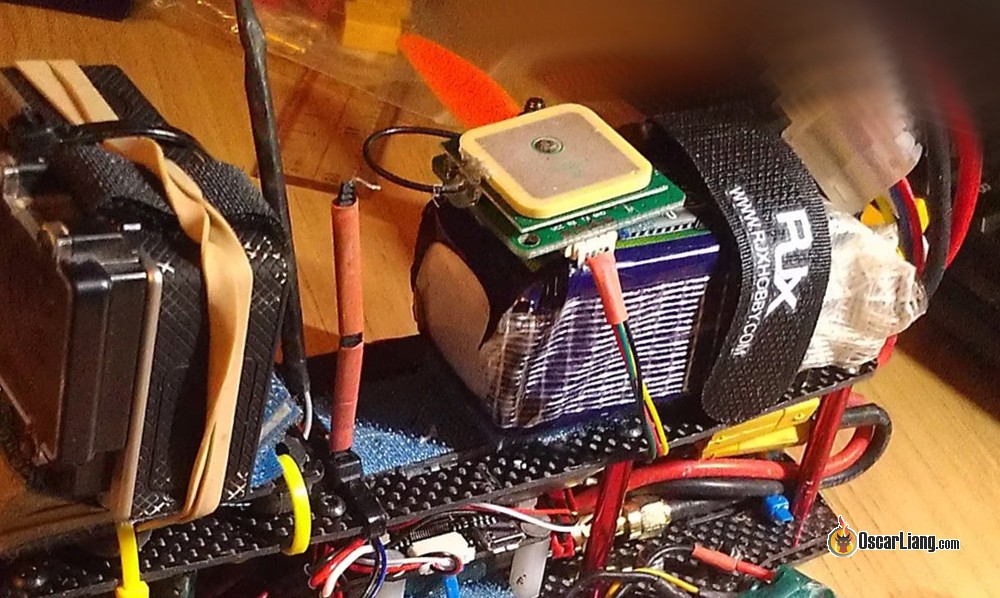
Сверху рамы (если аккумулятор ставится снизу).

Можно сделать «мачту» для GPS модуля, чтобы отодвинуть его подальше от рамы. Но в данном случае не очень удачно, т.к. рядом оказывается антенна видеопередатчика.

Основное правило: GPS модуль должен всегда смотреть на небо (за исключением моментов, когда вы делаете роллы и флипы).
Перед полетом убедитесь, что GPS приемник нашел спутники. Возможно есть смысл заранее включать коптер, для «прогрева» GPS, чтобы потом долго не ждать.
Дополнительные датчики, как их настроить?
Помимо GPS есть и другие датчики/сенсоры, но их не обязательно использовать. Комбинирование данных с разных датчиков даст больше полезной информации о том, что сейчас происходит с коптером. Позже я обновлю этот пост.
Барометр
Барометр — это датчик давления, при помощи него можно вычислить высоту полета коптера. Он более точен, чем GPS. Некоторые полетные контроллеры уже имеют встроенный барометр, обычно BMP280 (например, Kakute F7).
Компас/магнетометр
Нужен для определения направления коптера. Обычно это внешний датчик, который необходимо подключить к ПК через шину i2c.
Скажите пожалуйста, размер антенны влияет как-то на прием спутников или гео позиционирование?
В первую очередь надо смотреть не на размер, а на коэффициент усиления антенны.
Я выбираю между BN 220, BN 280, BN 880, скажите у кого будет самый сильный коэффициент усиления?
компас не нужен, и использоваться не будет
Вы по каким критериям выбираете? только чувствительность GPS? BN220 заметно легче.
Судя по спекам чувствительность у них одинаковая, но у 880 — активная антенна, т.е. в теории он должен ловить лучше.
Спасибо за ответы! Напишу здесь подробнее
Я собираю аналог Racelogic, это прибор который замеряет разгон автомобиля с места и до 100 км/ч, так же замеряет дистанцию и так далее.
Акселлерометр и компас не используются, все данные берутся с датчика ЖПС. Вес модуля и размер тоже не важен, мне главное чтобы прием спутников был максимально мощный, посмотрел на форумы — все хвалят 880, хотя в даташите по качеству приема не отличается от других своих более дешевых братьев.ъ
Успехов!
P.S. вес не важен, значит можно поглядеть в сторону внешних активных антенн.