
Компания Rotor Riot выпустила свой первый полетный контроллер Riot Control! В этом обзоре мы рассмотрим плату, качество сборки и покажем сильные и слабые стороны нового полетного контроллера.
Оригинал: Review: Riot Control Flight Controller FC by Rotor Riot
Купить Hypetrain Riot Control тут:
Дополнительная информация: как выбрать полетный контроллер для коптера
Характеристики полетного контроллера Riot Control
- F405
- MPU6000
- Питание: 2S – 6S
- Betaflight OSD
- Встроенный датчик тока
- 8MB памяти для Blackbox
- 3 последовательных порта
- BEC: 3.3V, 5V, 9V
Комплектация:
- пигтейл с XT60
- мини пищалка
- резиновые шайбы
- нейлоновые винтики и стойки
- кабель для регуляторов 4-в-1
Подробное описание
Характеристики что-то напоминают?
Да, ПК Riot Control основан на DYS F4 Pro с небольшими изменениями, сделанными в Rotor Riot. Поэтому расположение элементов точно такое же. Ну и ко всему прочему этот ПК производит фирма DYS.
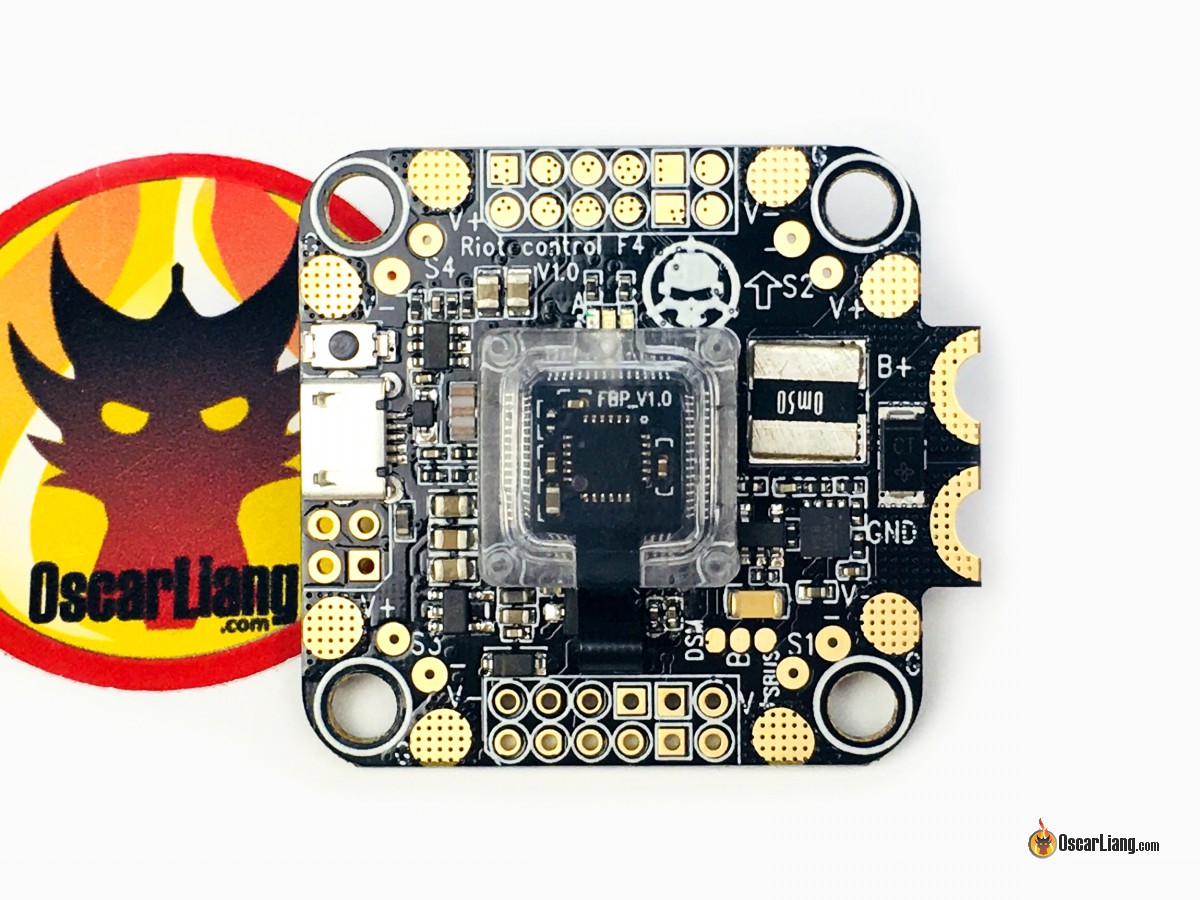
Гироскопы на антивибрационном подвесе и защищены пластиковым корпусом. Монтажные отверстия увеличены, чтобы в них влезли резиновые шайбы. Усилит или ослабит шумы двойной антивибрационный подвес? Скоро выясним.
Хотелось бы иметь вариант ПК с гироскопами ICM20689, чтобы поставить частоту 32k/32k. Это бы позволило использовать все преимущества дополнительной фильтрации шумов.
Последовательные порты, расположение элементов и контактных площадок
На плате всего 3 последовательных порта (UART), включая один, предназначенный для SBUS. Для кого-то этого может не хватить, подумайте, сколько периферии мы используем: SmartPort, управление видеопередатчиком, телеметрия регуляторов, Runcam Split, управление курсовой камерой, приемник… Именно поэтому многие современные ПК имеют 5 последовательных портов.
UART1 для приемников с последовательными протоколами, на плате есть джампер, который позволяет включить или выключить инверсию для SBUS.
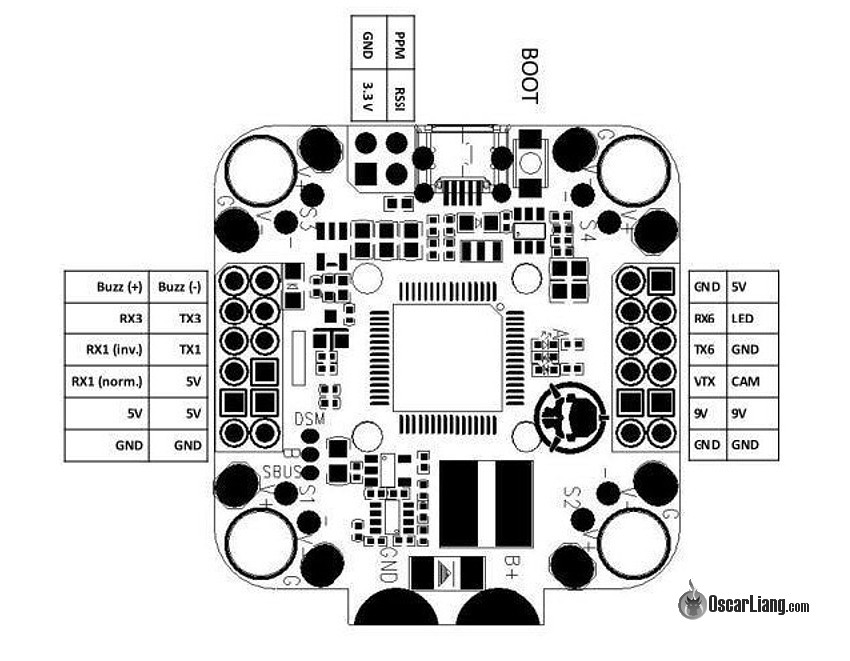
Контактные площадки нормального размера, их легко паять. Все они продублированы с двух сторон платы.

Съемные гироскопы с антивибрационным креплением
Корпус, защищающий гироскопы, крепится к плате 4 винтами. Они на нижней стороне и их легко отвернуть.
Сама микросхема с датчиками полностью залита каким-то компаундом для снижения вибраций. Так что датчики болтаться не будут.

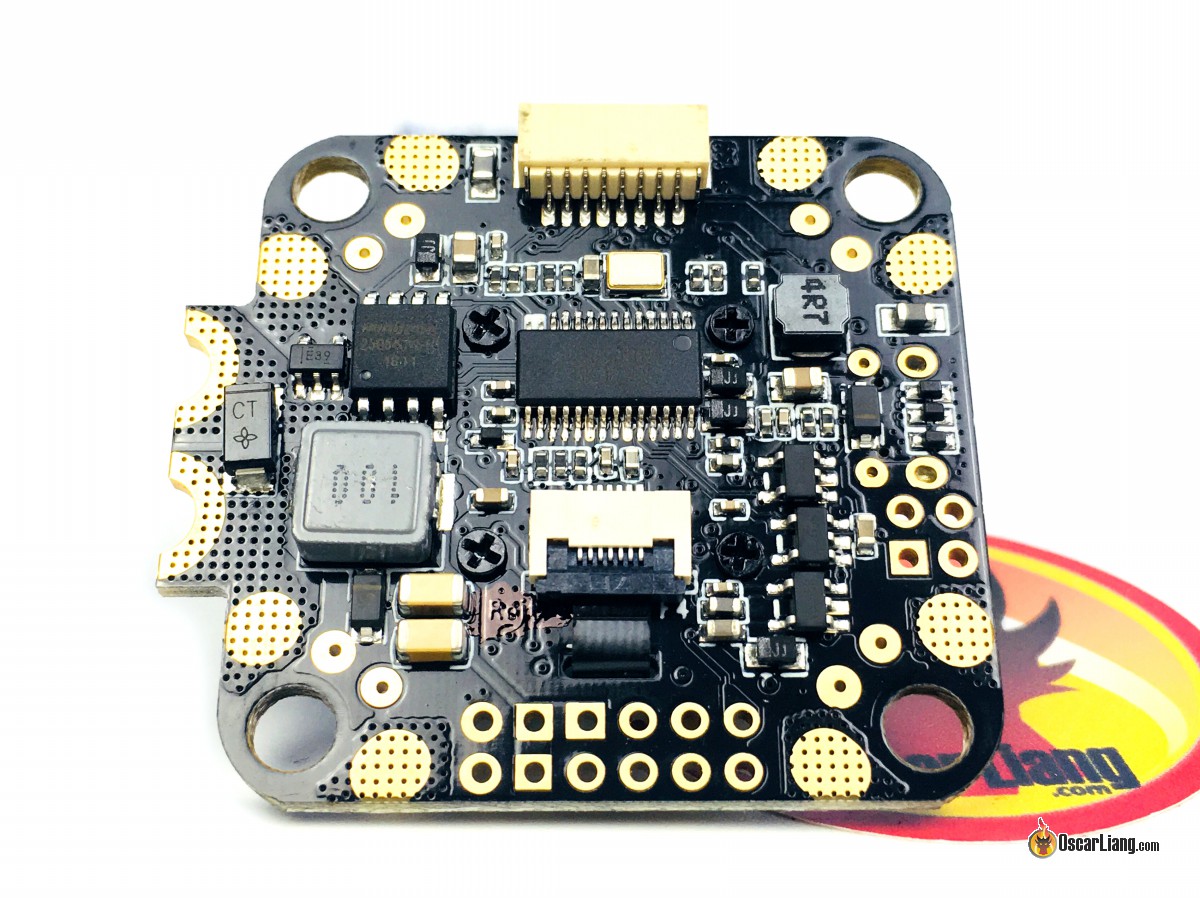
Плата с датчиками подключается к полетному контроллеру плоским шлейфом. Он проходит через пропил в плате и втыкается в разъем на обратной стороне.

Шлейф можно легко вытащить из разъема руками. Пригодиться, если вам зачем-то захочется поменять гироскопы.

Заключение
Скоро поставлю этот полетный контроллер на коптер и посмотрю на то, как он летает, позже обновлю этот пост.
Плюсы.
- Удобное расположение контактов и элементов — легко собирать коптер
- Двойное антивибрационное крепление: шайбы на плате и отдельно гироскопы
- Контактные площадки продублированы с двух сторон платы
- Разъем для регулей 4-в-1
- Можно поменять гироскопы
Минусы
- Нет Low-ESR конденсатора
- Нет отдельных контактов для телеметрии регуляторов
- Всего 2 свободных последовательных порта (не считая выделенного для SBUS)
- Гироскопы позволяют выставить частоты только 8k/8k