
Я взволнован и одновременно напуган этим проектом. Собираюсь построить летающее крыло и полетать FPV. У меня нет никакого опыта полетов на летающих крыльях, так что думаю будут и краши и кровь 🙂
Оригинал: Building my first Mini Race Wing for FPV – No flight controller
Большое спасибо Flybot, за то, что поверили нубу и предоставили Mini Race Wing. Более подробно про это крыло и его покупку смотрите тут: http://flybot.de/en/miniracewing-kit-fpv-race-wing
Что хорошего в Mini Race Wing?
- Карбоновая рама, центроплан выглядит и собирается как мини коптер!
- Обычно, летающее крыло это просто кусок пенопласта, тут во Flybot поступили очень умно и сделали съемные крылья. Это ослабляет удар при краше, да и упрощает транспортировку
- Mini Race Wing летает очень быстро 🙂
Распаковка и моя конфигурация
В комплекте с крылом идет всё необходимое для сборки, кроме электроники, все детали хорошо упакованы. Крылья сделаны из пенопласта, элевоны из бальсы, рама — карбон.
Я новичок в этом деле, но мне сказали, что большинство моторов и регулей от коптеров подойдет и для летающих крыльев. На сайте Flybot, предлагается несколько конфигураций — моторы/регуляторы/аккумуляторы, которые дадут разные максимальные скорости, так что вы можете оценить какую скорость ждать от ваших комплектующих.
Что касается мотора, я думаю нужно выбирать что-то типа 2205 — 2207, с 2300 — 2600 KV. Я решил использовать Sunnysky R2306 2600KV просто потому что у меня был один запасной. В комплект к этому мотору я буду использовать двухлопастной винт 5045. Эта конфигурация довольно энергоэффективна и не потребляет больше 25 А во время полета.
Регулятор, он должен соответствовать току, потребляемому двигателем с выбранным винтом, а также иметь встроенный 5 В BEC для питания сервомашинок и приемника. Подойдут старые регуляторы, все эти новомодные штучки типа «активное торможение» (“active-braking”) или «аппаратный ШИМ» (“hardware PWM”) нафиг не нужны на летающем крыле 🙂 я буду использовать купленный 4 года назад Hobbyking 30A ESC.
Приемник должен иметь минимум 3 PWM канала (газ, руль высоты, элероны). SBUS и PPM в нашем случае не нужны, потому что мы не собираемся использовать полетный контроллер. Похоже, что идеальным вариантом будет D4R-II.
- Мотор Sunnysky R2306 2600KV
- Винт: 5045×2
- HobbyKing 30A ESC
- Сервомашинки: 2 шт, 9 грамм (какие-то дешевые с ebay)
- Приемник: Frsky D4R-II
- Аккумулятор: 4S 1500mAh
FPV оборудование:
- Runcam Swift 2 (VBAT OSD будет очень полезен)
- какой-то видеопередатчик с питанием напрямую от 4S LiPo
Для сборки также понадобится:
- суперклей (цианокрилат)
- скотч (шириной 5 см)

Собираем Mini Race Wing
Собирать начал согласно приложенной инструкции. Она довольно простая и хотелось бы, чтобы включала в себя побольше картинок, или даже видео. Так как я совсем новичок в этом вопросе, то потратил довольно много времени чтобы понять, где что имелось в виду. Однако, думаю, что у тех, кто уже собирал самолеты таких проблем не будет.
Тут я вклеил карбоновые детали в крылья для увеличения жесткости, прорезал канавки в элевонах для тяг.


Закрепил элевоны на крыльях при помощи скотча.

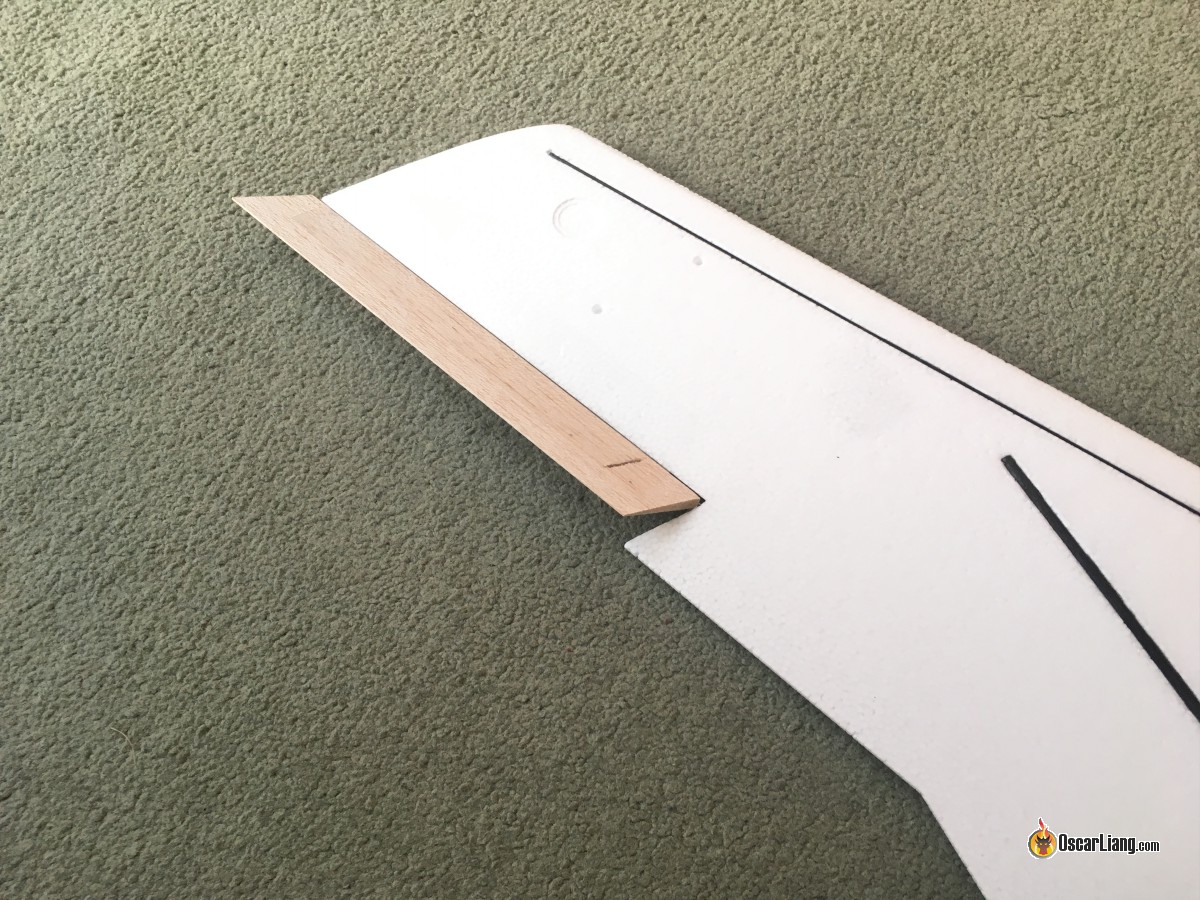
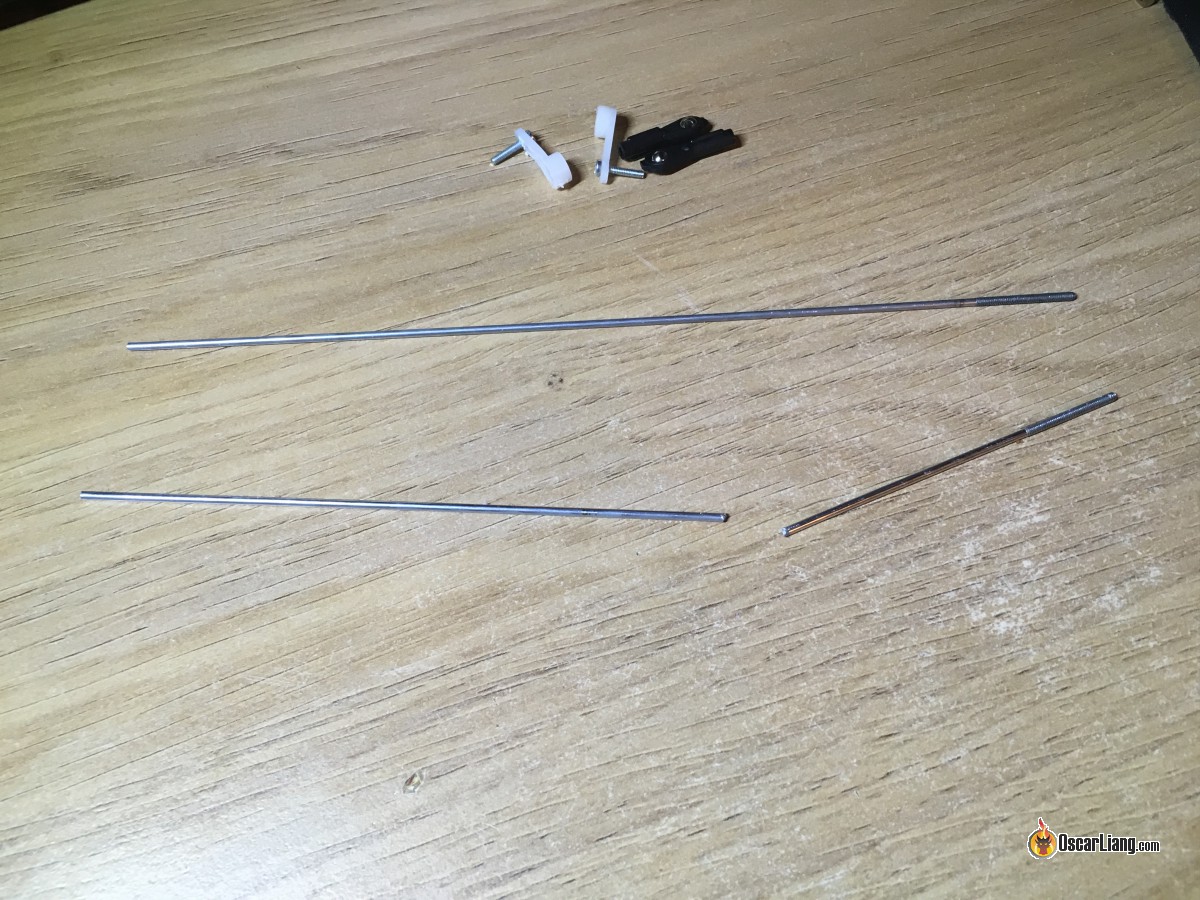
Начал собирать тяги для сервомашинок. Нужно было сделать тяги определенной длины, что довольно сложно без нормальных инструментов. Пришлось надпили надфилем и сломать руками.
Довольно много вещей пришлось делать самому, хотя это все мог сделать производитель. Например, отрезать тяги нужной длины и сделать прорези в элевонах. Я попросил об этом Flybot и, надеюсь они сделают набор более простым.

Чтобы получить нужную длину, я все померял по месту, без приклеивания сервомашинок.
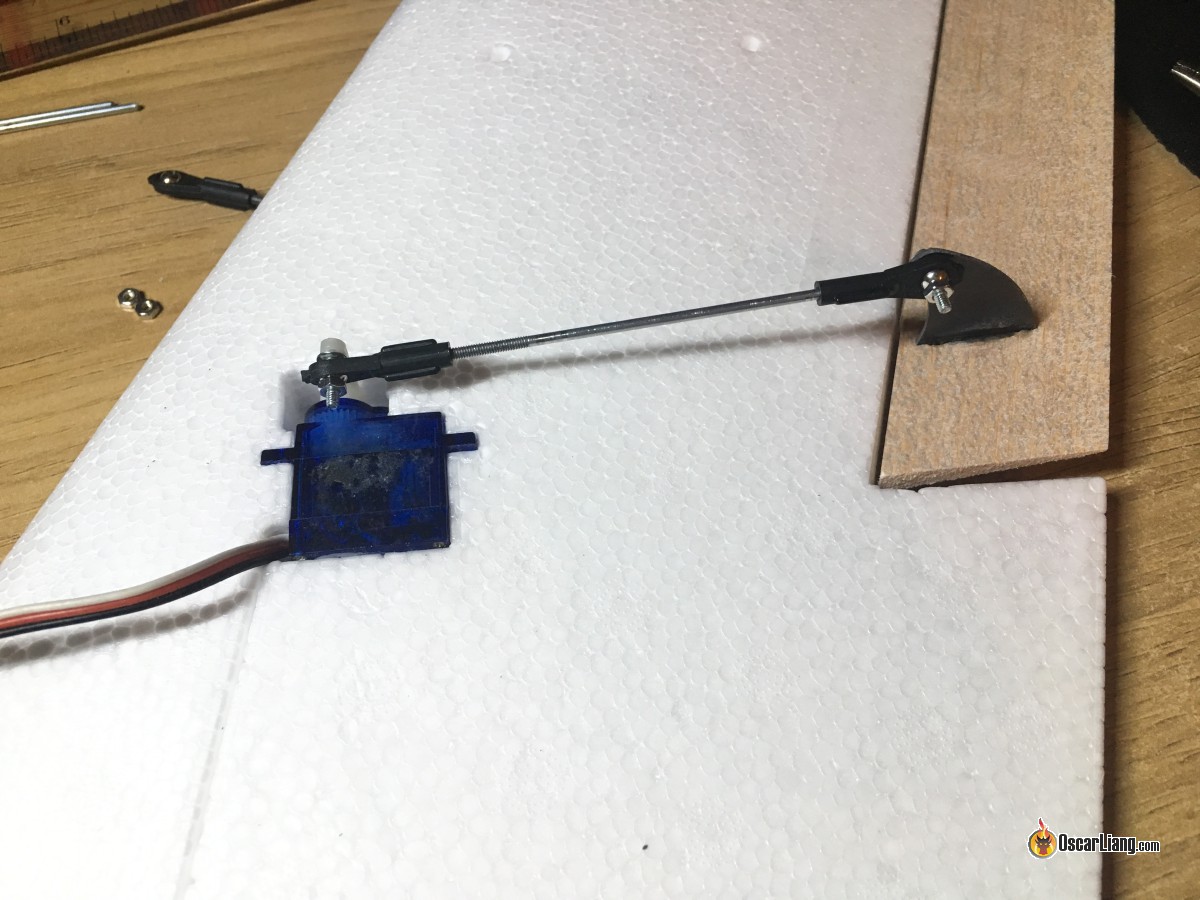
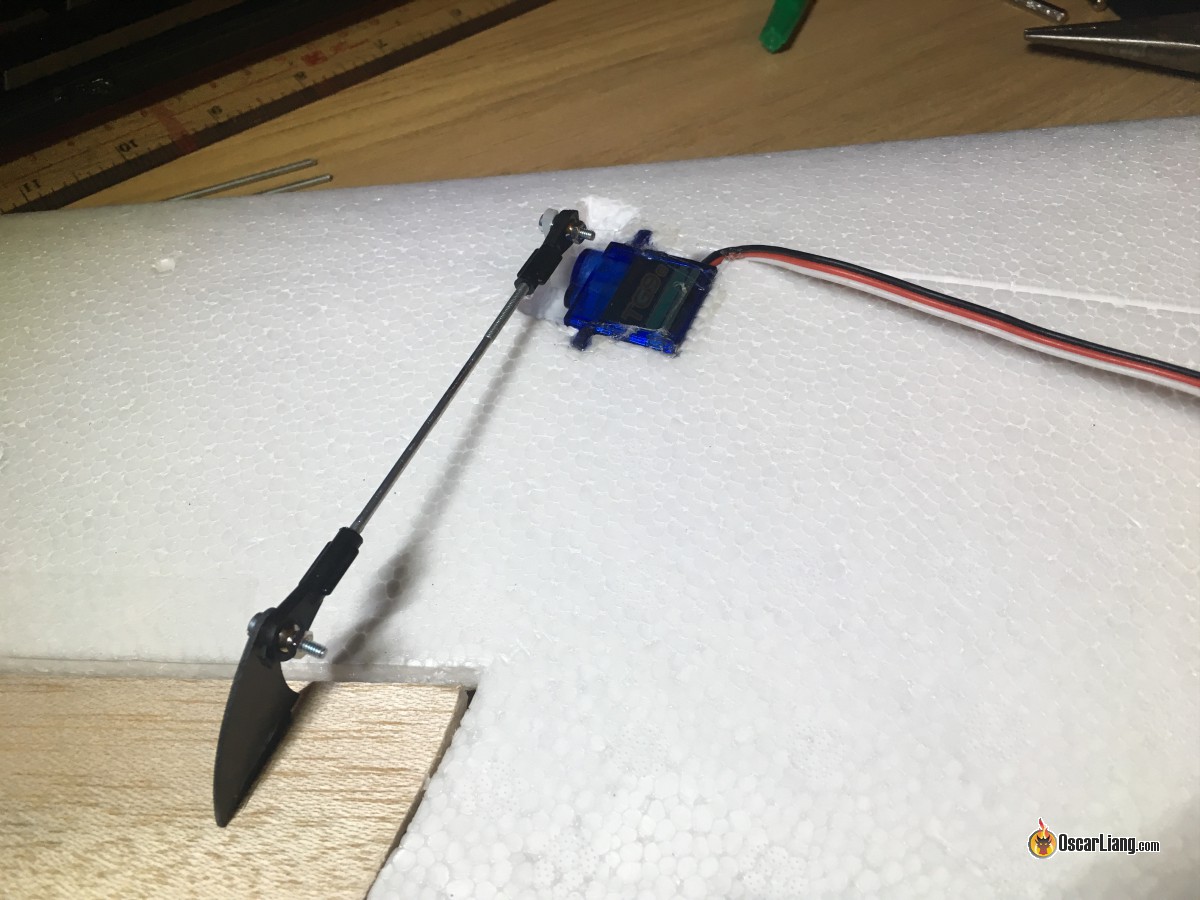
Выяснилось, что длины проводов у серв не хватает, длина должна быть примерно 27-29 см, не считая разъемов. После удлинения проводов вклеил сервы.

Наклейки на крыло из комплекта

Собираем электронику
Соединение довольно простое, аккумулятор питает регулятор скорости, который управляет мотором. Регуль также питает приемник и получает значение газа, сервы напрямую подсоединяются к приемнику и питаются через него.
Припаял мотор к регулю. Замечу, что если вы не можете поменять направление вращения мотора в настройках регулятора, то просто поменяйте между собой два любых провода от регуля к мотору. Важно правильно выбрать направление вращения мотора исходя из того, какие у вас винты (CW или CCW).

Оборудование для FPV — отдельная ветка в схеме питания. Я предпочитаю использовать комплектующие, которые можно напрямую питать от аккумулятора, без дополнительных стабилизаторов.
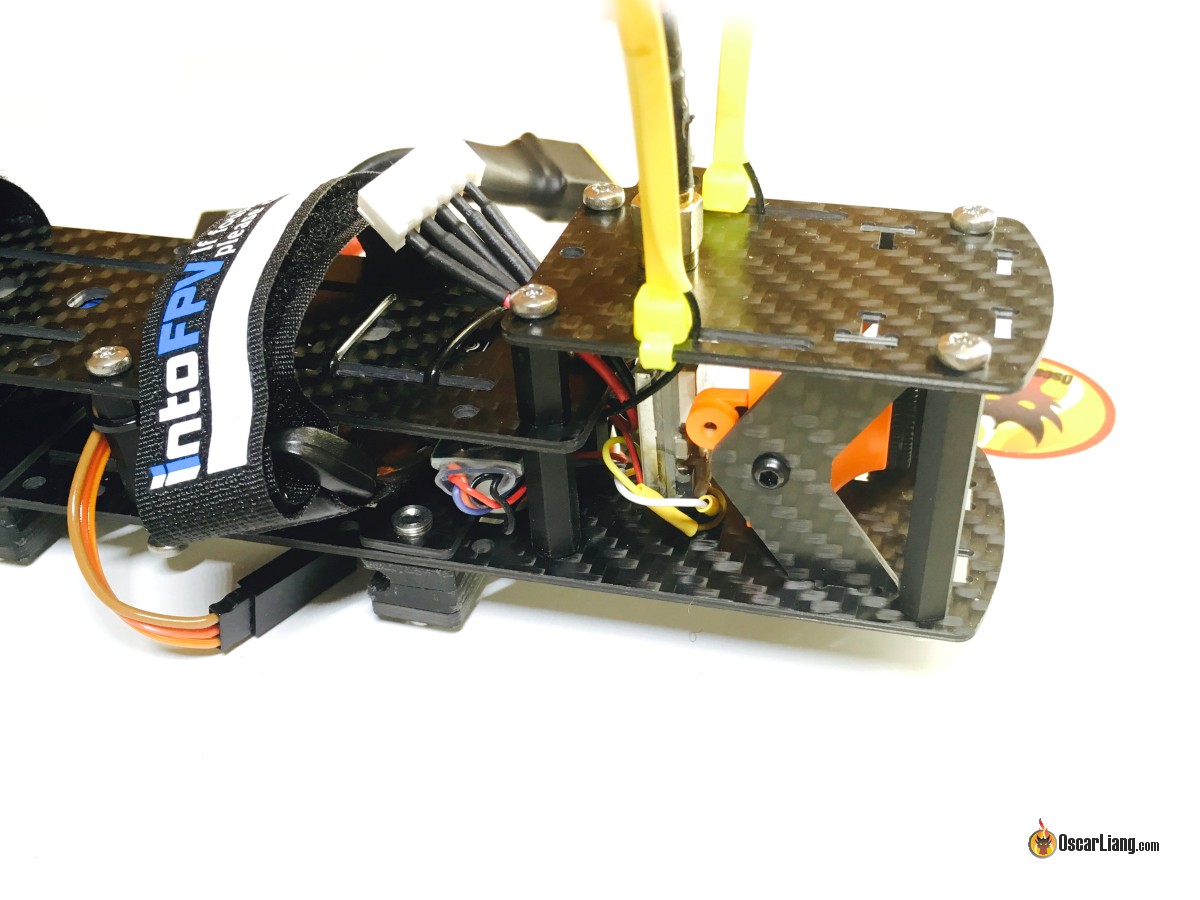
Для питания видеопередатчика и камеры я решил использовать балансирный разъем аккумулятора с LC фильтром (для уменьшения шума по питанию). Конечно, можно взять питание прямо с регуля, чтобы не использовать дополнительный разъем, но мне нравится именно мой вариант, потому что можно отключить FPV и летать без него.

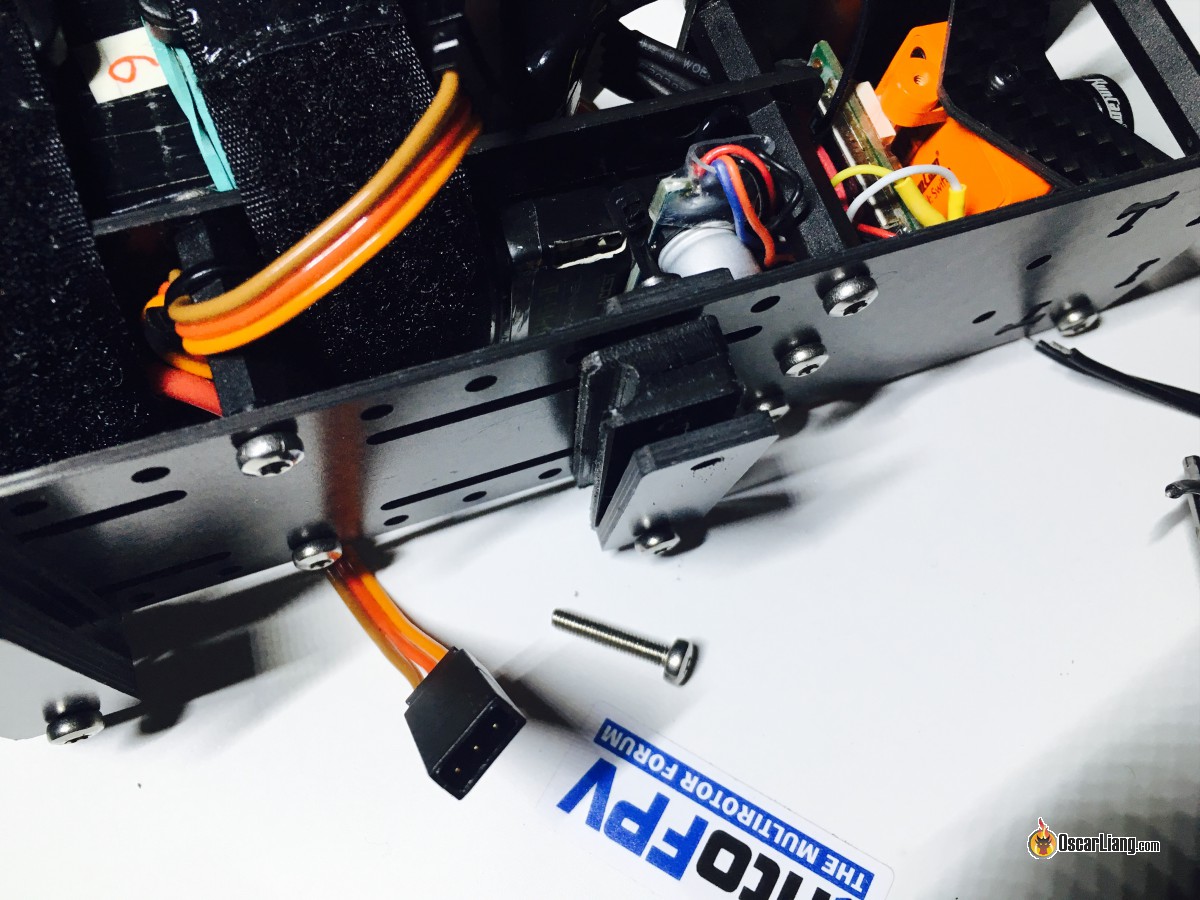
Вот так выглядит карбоновая рама со всем оборудованием.
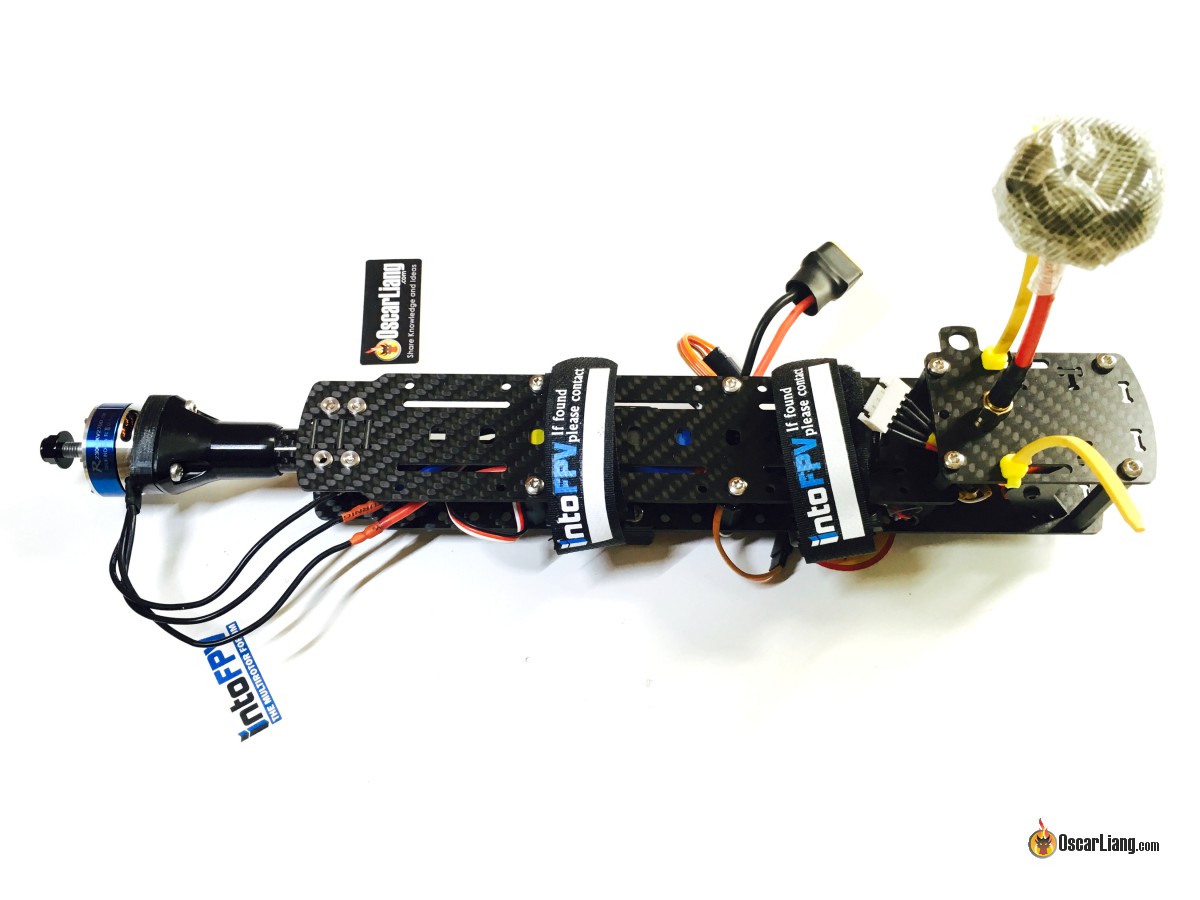
Выглядит практически как миникоптер. Поэтому для меня это офигенное крыло. 🙂
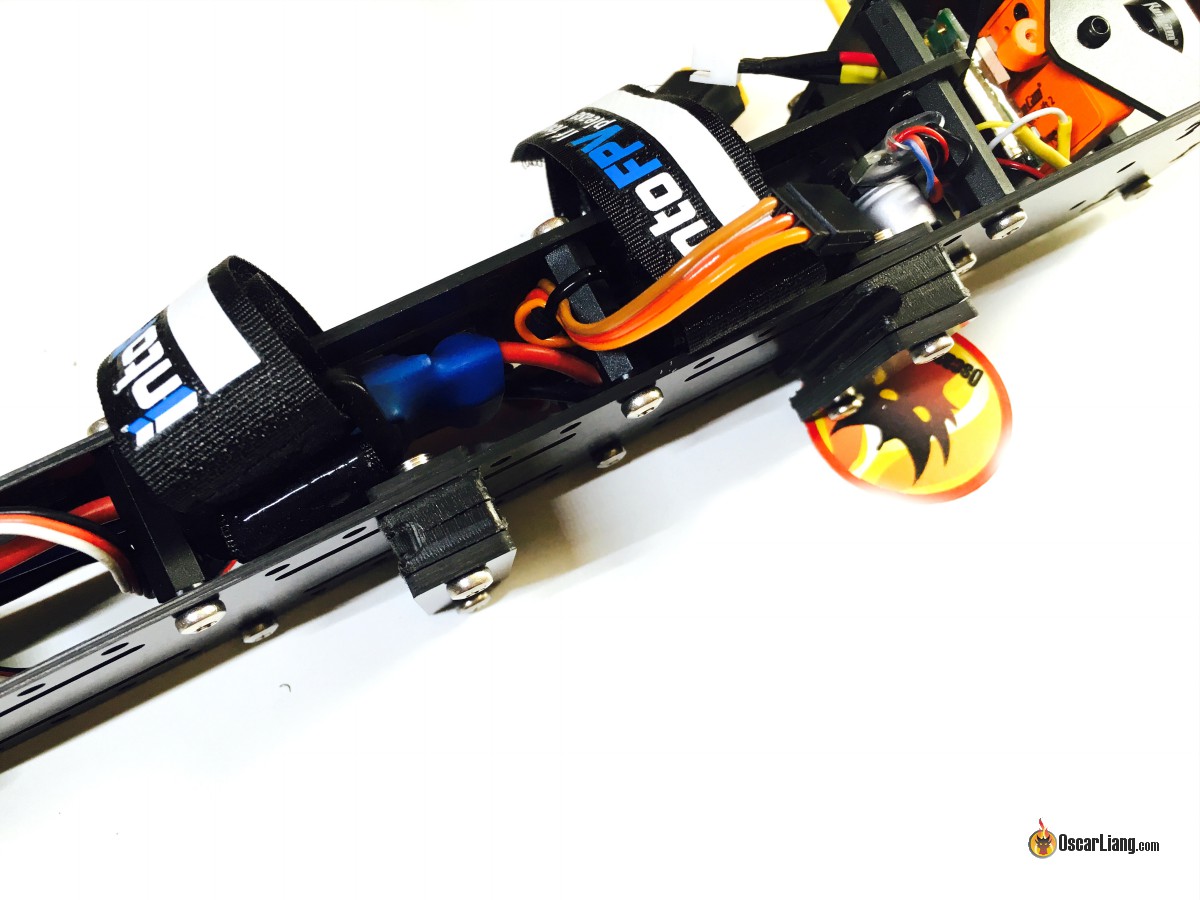
Крылья цепляются к раме при помощи держателей, расположенных снизу, сервы подключаются при помощи сервоудлиннителей. В случае падения, крылья отсоединяться, и сервы отключатся с минимумом повреждений.
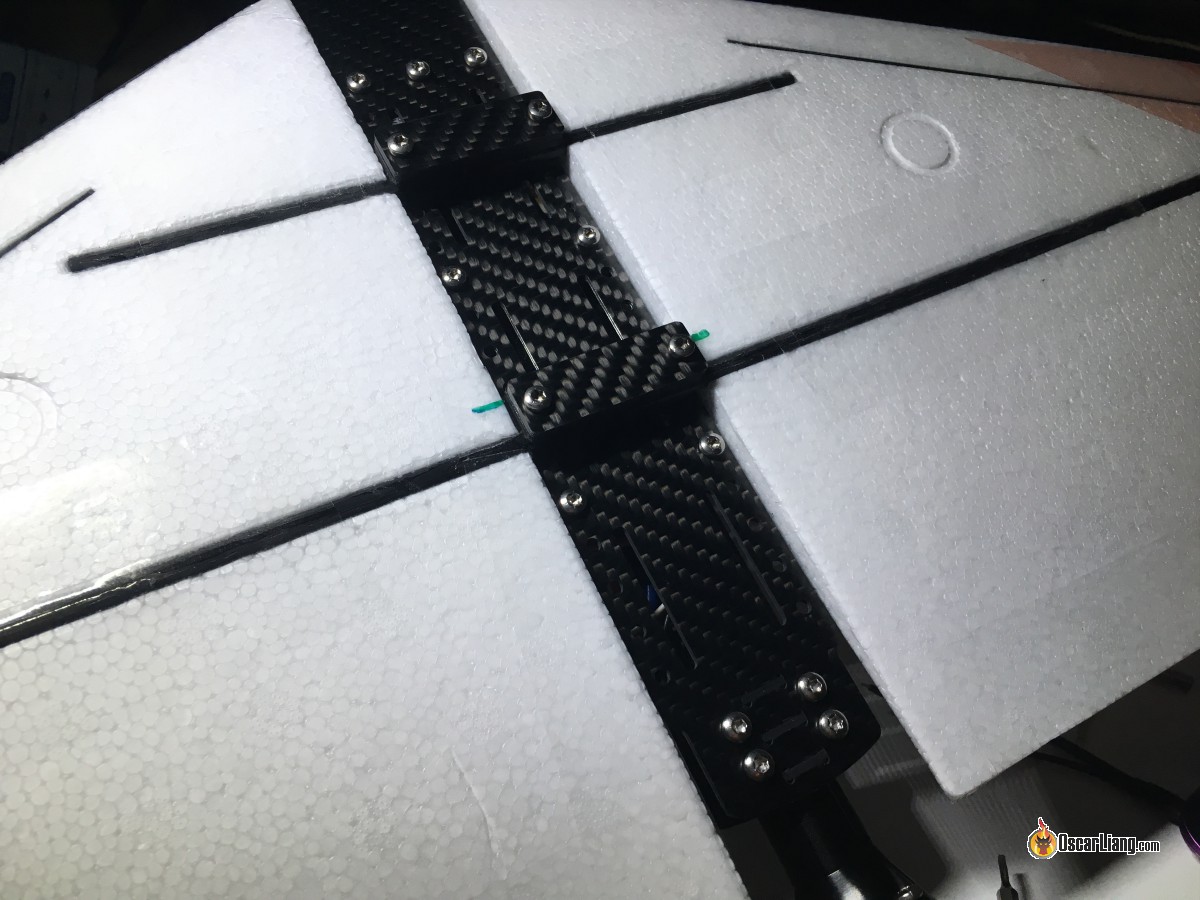
Крепление крыльев крупным планом.
Установил крылья и отметил центр тяжести.



Настройка Тараниса
Скоро обновлю пост.
Полеты и что я об этом думаю
В последнее время был занят и поэтому было мало времени на полеты. Это мое первое летающее крыло, так что я все еще учусь на нем летать. Это бывает непросто, потому как я не стал читерить и устанавливать полетный контроллер (знаю, что автозапуск у iNAV сильно всё упрощает 🙂 ). Это был забавный вечер и примерно 30 падений пока учился запускать крыло. Хорошо, что оно довольно прочное и хорошо сопротивляется нубам 🙂
Планирую поставить ПК и посмотреть на разницу. Не теряйтесь, скоро обновлю пост 🙂