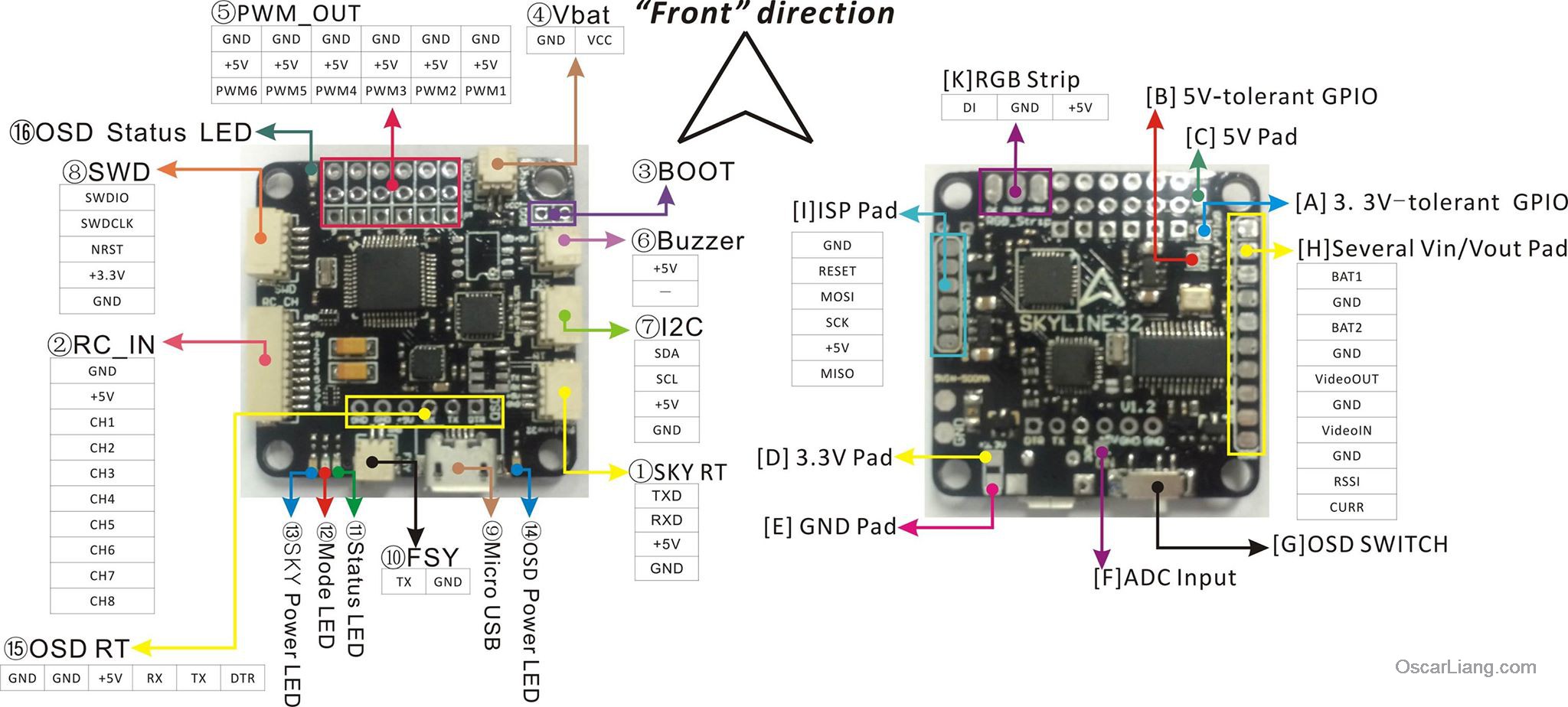
Skyline32+OSD — полетный контроллер с интегрированной minimOSD, это делает настройку OSD и укладку проводов намного проще. В этом посте мы рассмотрим основные характеристики и распиновку этого полетного контроллера.
Emax прислал мне эти контроллеры «на поиграться», однако из-за недостатка времени, я их еще не пробовал на своих мультикоптерах. Сейчас я покажу вам платы, их распиновку, а более детальный обзор будет в следующем посте про сборку квадрика.
Купить Skyline32+OSD на сайте EMAX:
- F1: http://www.emaxmodel.com/emax-skyline32-osd-flight-controller-acro.html
- F3: еще нет в продаже
Полетный контроллер пришел красивой пластиковой коробке.

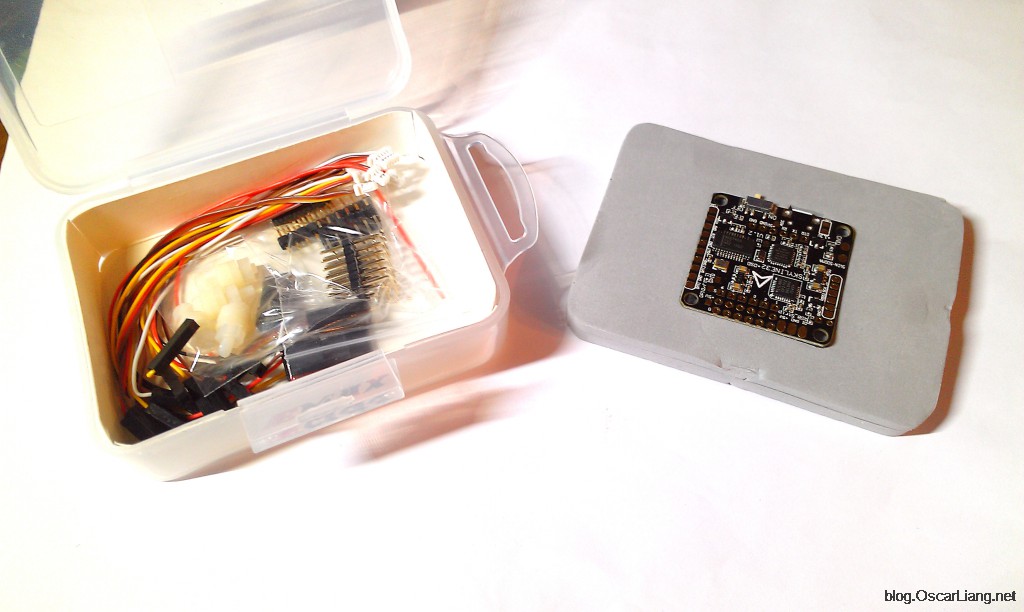

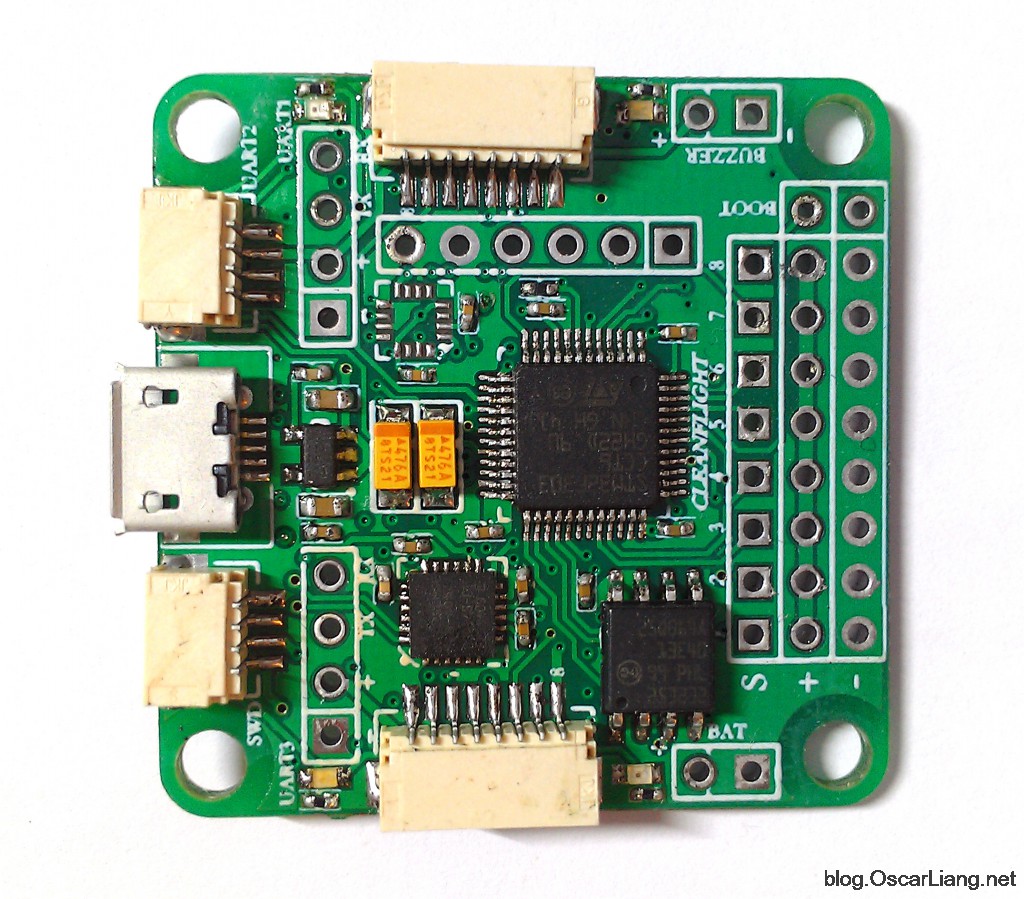
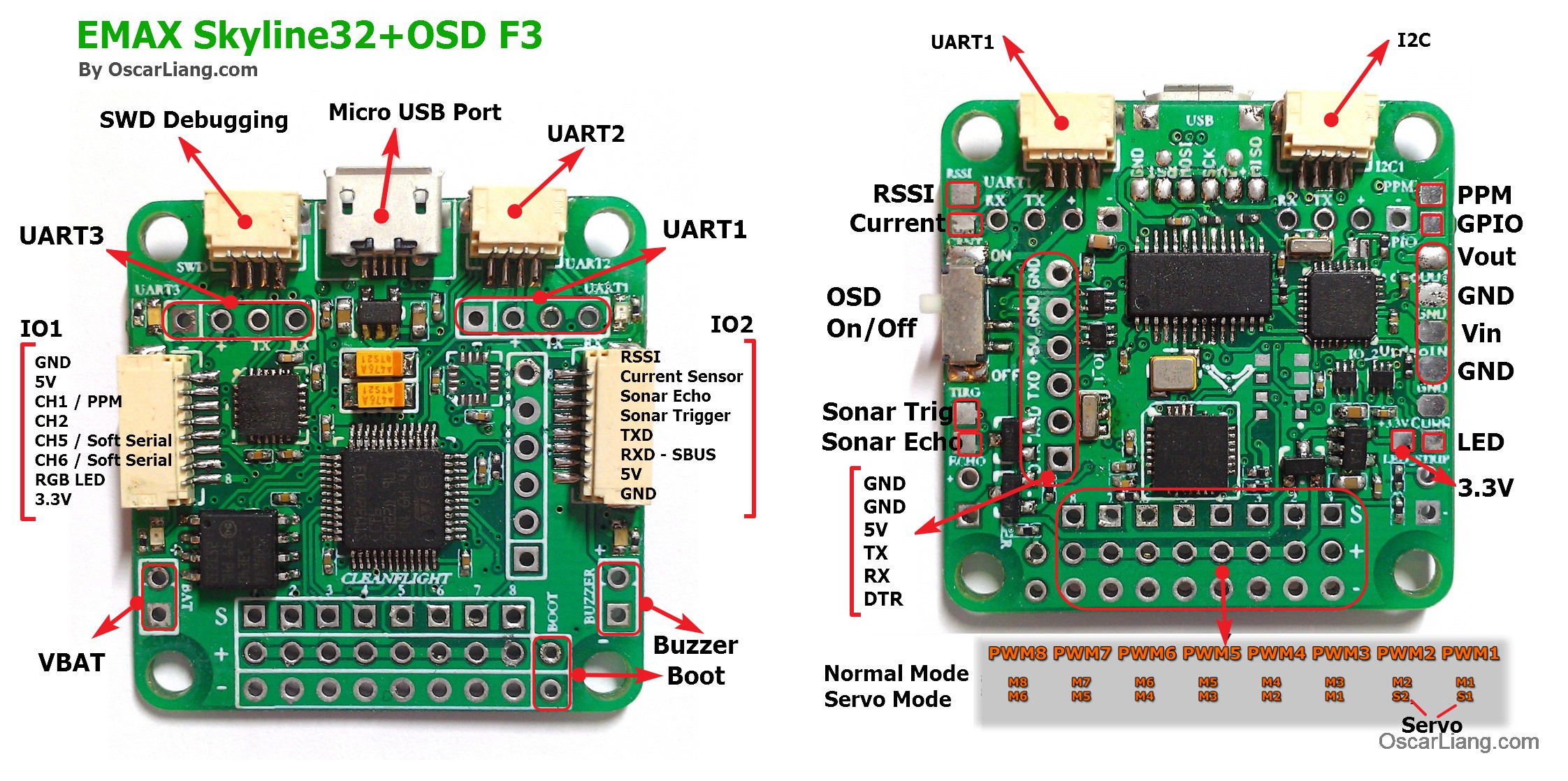
Skyline32+OSD полетные контроллеры на F1 и F3
Это второй ПК со встроенным OSD из тех что у меня были (первый был BrainFPV, англ.). Мне очень нравится идея интеграции MinimOSD в ПК, обычно требуется минимум 4 провода между OSD и контроллером (TX, RX, 5В, земля), а куча проводов может выглядеть очень не аккуратно.
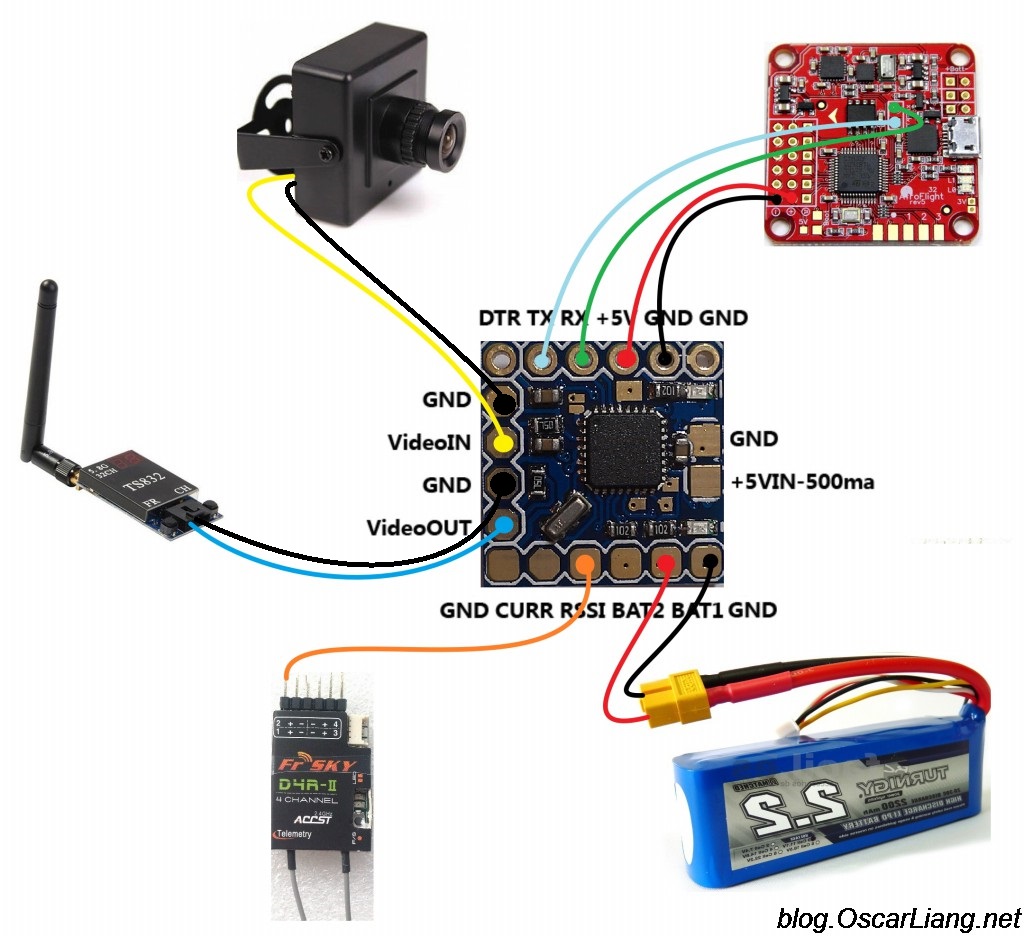
При использовании Skyline32+OSD, камера, видео передатчик, RSSI, датчик тока и напряжения могут быть подключены к контроллеру, что делает разводку проводов аккуратнее.
Однако не все используют OSD, так что этот полетный контроллер для тех кто OSD собирается использовать.
В OSD уже прошита MWOSD, однако, если вы хотите обновить или заменить прошивку, то можете воспользоваться FTDI адаптером. Контакты для пайки имеются на плате.
Acro в названии полетного контроллера от EMAX означает отсутствие барометра и компаса, которые есть на более дорогих платах.
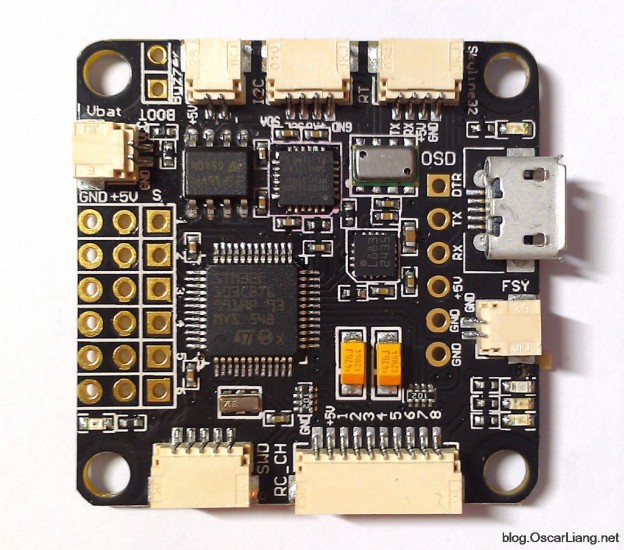
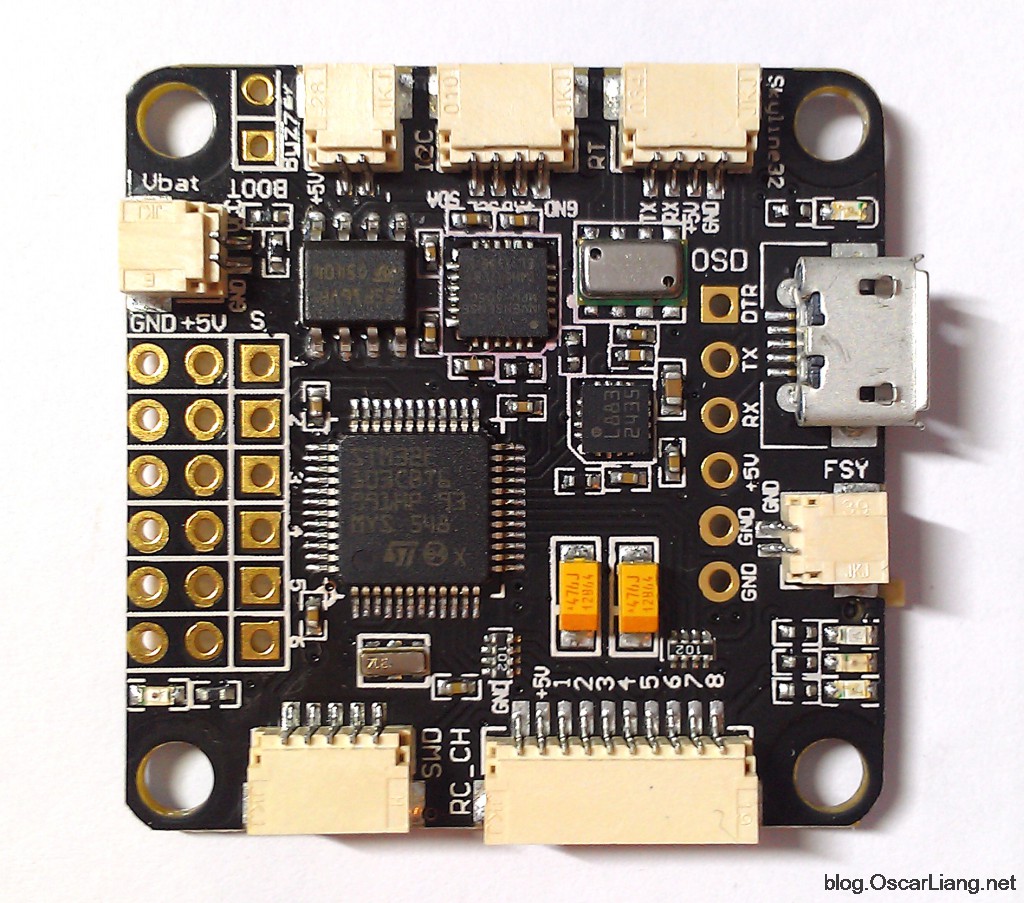
Версия на процессоре серии F1
Как вы уже наверное знаете из предыдущей статьи про различия между контроллерами на процессорах F1 и F3, процессор F1 имеет только 2 аппаратных последовательных порта, при этом UART1 также используется USB портом, это значит что вам нужно отключать устройство с порта UART1 при подключении к компьютеру (Cleanflight GUI).
Именно поэтому на плате имеется переключатель, который временно отключает OSD, его также можно использовать для того, чтобы отключить OSD в полете.
Хорошая новость в том, что у вас все еще остается 1 свободный UART порт, даже при использовании OSD, а на плате есть чип памяти для Blackbox (англ.), поэтому нет необходимости подключать внешний openbox.
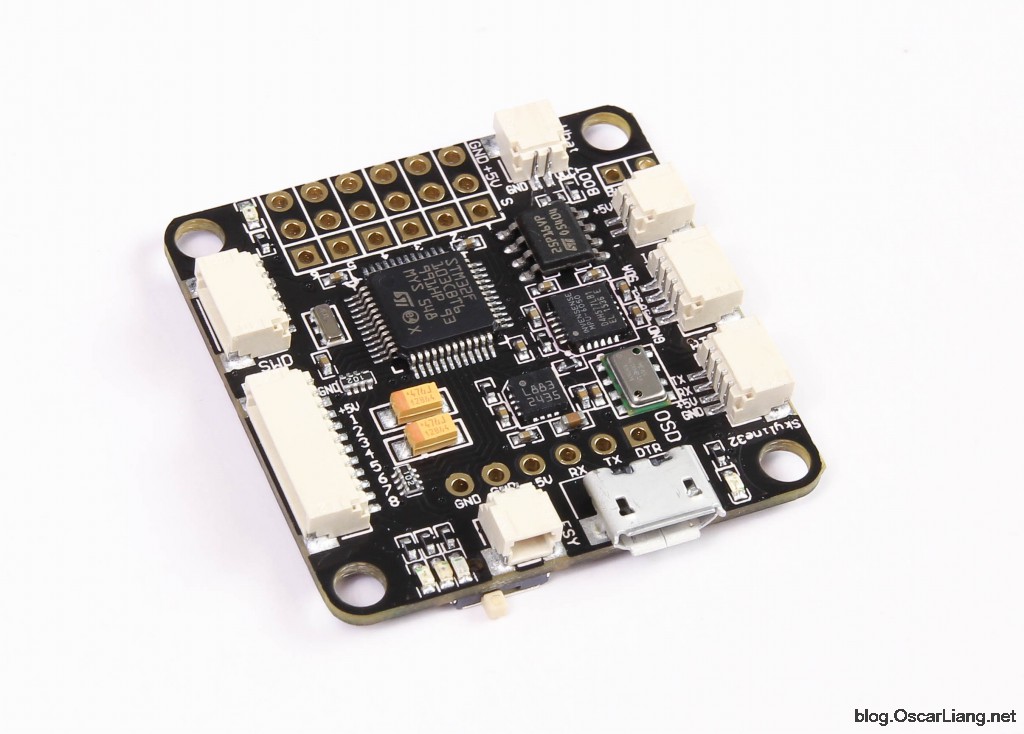
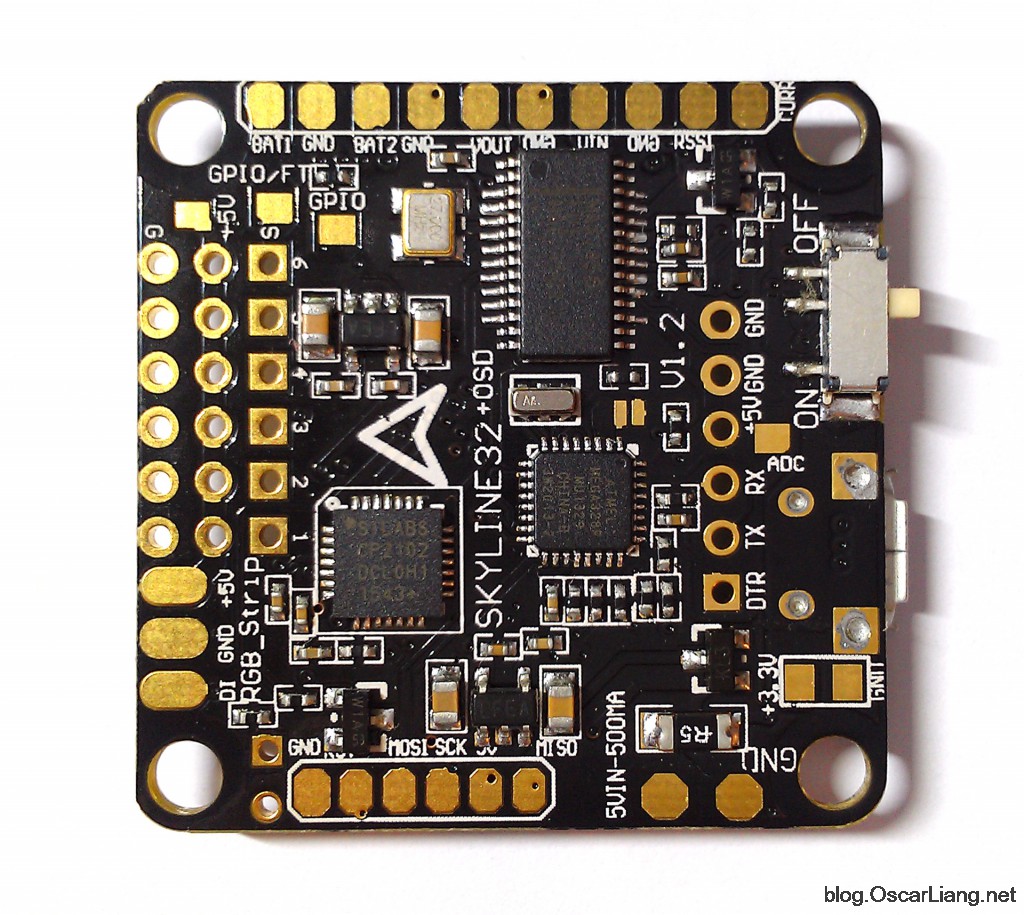
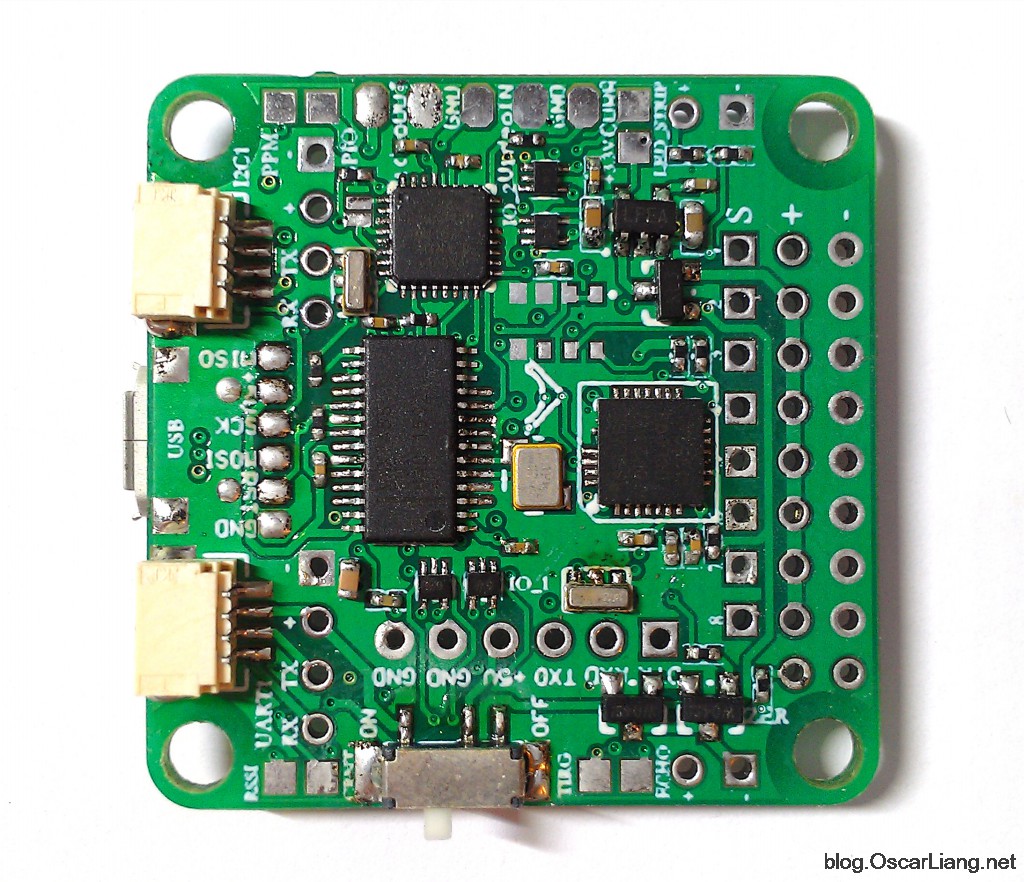
Версия на процессоре серии F3
На самом деле мне более интересен контроллер на F3 чем на F1. Я получил тестовый образец, и по нему нельзя судить о качестве, распиновке окончательной версии. Вот что точно будет в итоговой версии, в отличии от тестовой платы:
- Плата будет черной, а не зеленой
- Будет встроенный стабилизатор на 5В как в Dodo
Практически такая же распиновка как у SPRacing, правда с дополнительными контактами для OSD.
За и против
Плюсы
- Поддержка Cleanflight, Betaflight
- Упрощает укладку проводов
- Подходит для мелких квадриков с ограниченным пространством под электронику
- Выключатель OSD, позволяет освободить UART порт
- Контактные площадки для подпаивания камеры и видео передатчика
- OSD позволяет настраивать коптер в поле при помощи аппаратуры управления
- Не нужно париться из-за проводов к OSD и настройки самой платы OSD
- Есть чип памяти
- Версия на F3 имеет поддержку до 8 PWM выходов на моторы, поддерживаются трикоптеры, квадрокоптеры, гексакоптеры и октакоптеры
- В версии F3 мне нравится тот факт, что есть выбор — использовать контактные площадки или разъем JST для UART1
- Плата на F3 позволяет подключить OSD + SmartPort + SBus + GPS + светодиоды + напряжение аккумулятора + сонар + 8 моторов – все это одновременно!
Минусы
Да, есть куча функций, но это ведет к кошмару с разъемами. Для начинающих это слишком сложно, и даже меня смущает распиновка этого полетного контроллера.
На плате есть контакты для пайки, разъемы JST и даже отверстия для штыревых разъемов, я не везде мог прочитать мелкие надписи, некоторые вообще без надписей, и приходится заглядывать в инструкцию.
Большая нагрузка по питанию 5В, т.к. MinimOSD и контроллер питаются от одного источника, поэтому нужно убедиться что стабилизатор или BEC дают необходимый ток. Не забудьте учесть прочие устройства, питающиеся от контроллера, например приемник.
Оба контроллера используют MPU6050 на шине i2c, которая ограничивают частоту опроса. Неплохо работает на Betaflight до 2кГц, но не очень хорошо на Raceflight.
Где я буду использовать этот полетный контроллер?
Планирую собрать квадрик на 3″ винтах с этим контроллером, сборка должна получиться очень аккуратная благодаря сэкономленному пространству от MinimOSD.
Привет, Оскар! Давай к нам на форум все твои обзоры повесим! Форум чисто по гонкам на дронах, приглашаем публиковаться у нас на страницах!
Забыл ссылку дать-то :)))
http://drone-racing.su/
Я не Оскар 🙂 просто по договоренности с ним, перевожу и публикую его посты.
Саш, все равно присоединяйся, вместе поддержим форум и наполним полезной инфой
Можем ссылками обменяться, если хочешь.